

Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm
- PMID: 37218768
- PMCID: PMC10204407
- DOI: 10.3390/biomimetics8020182
Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm
Abstract
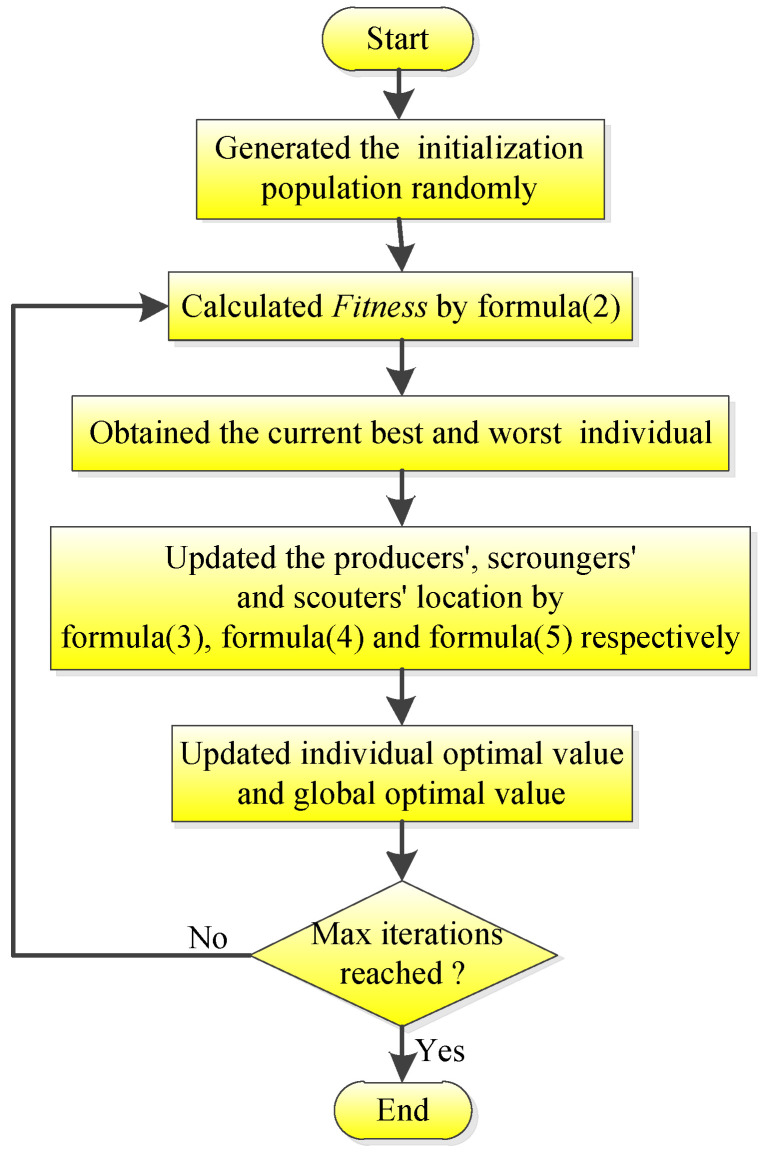
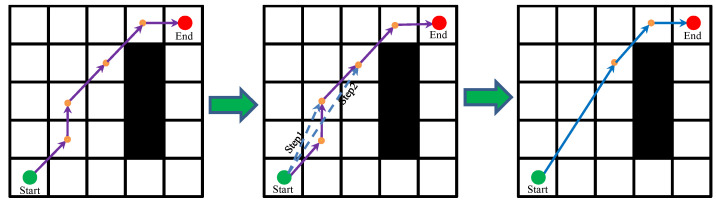
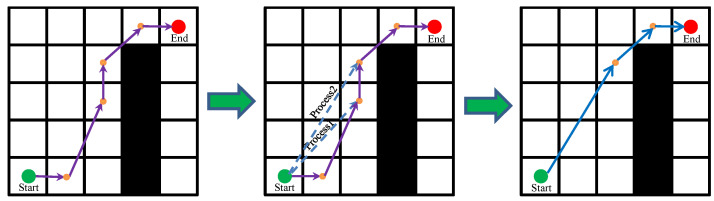
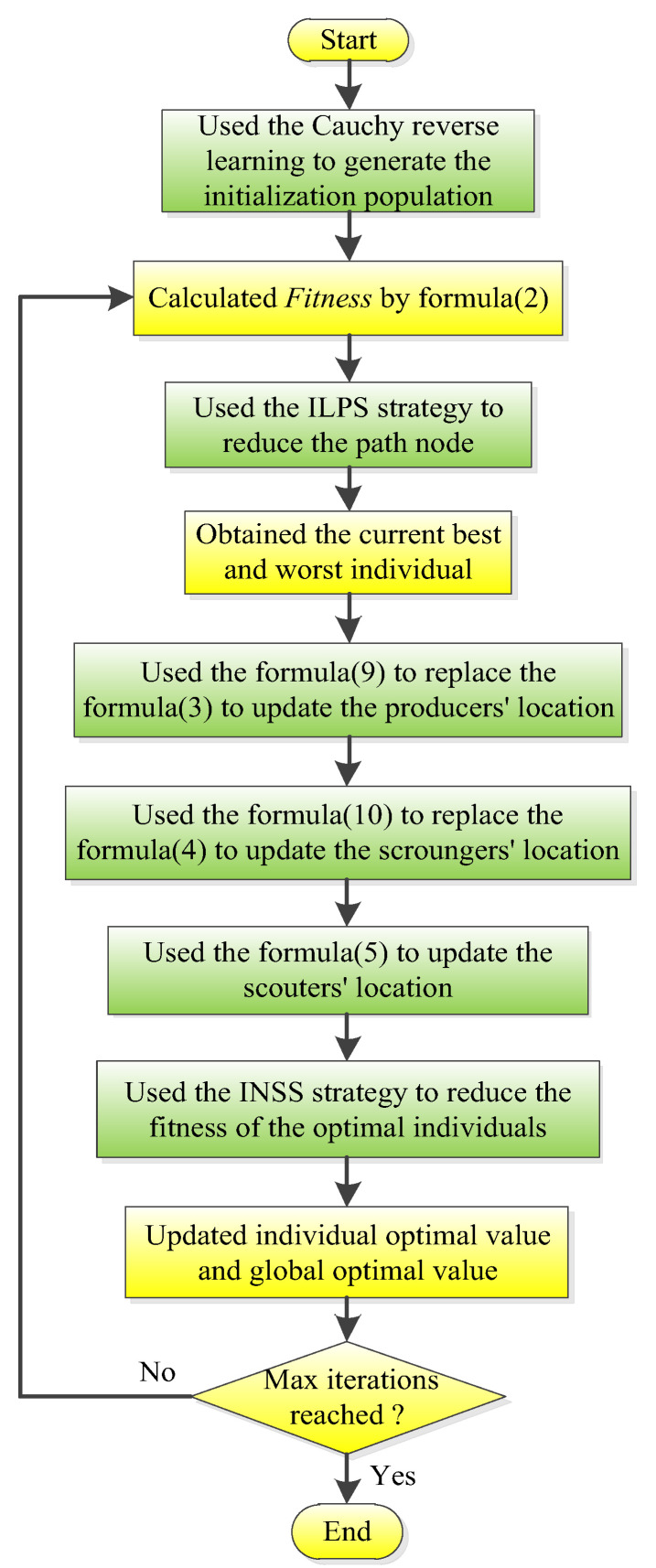
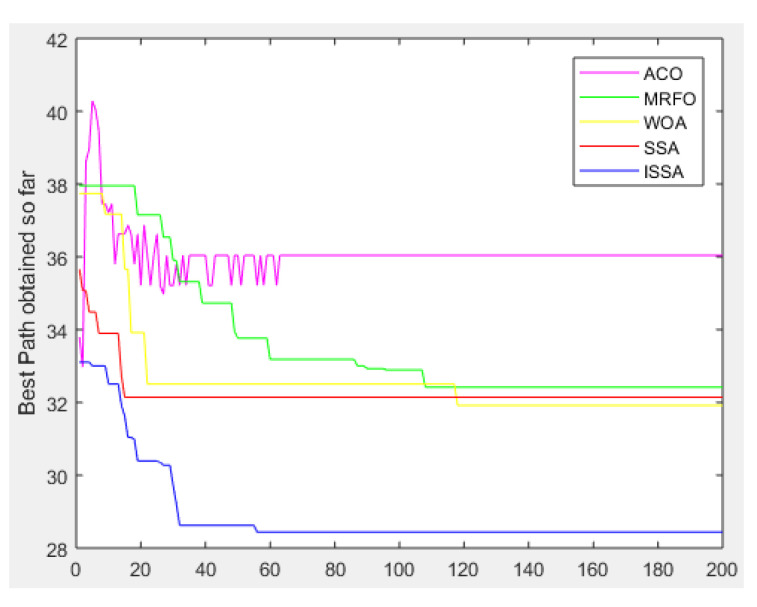
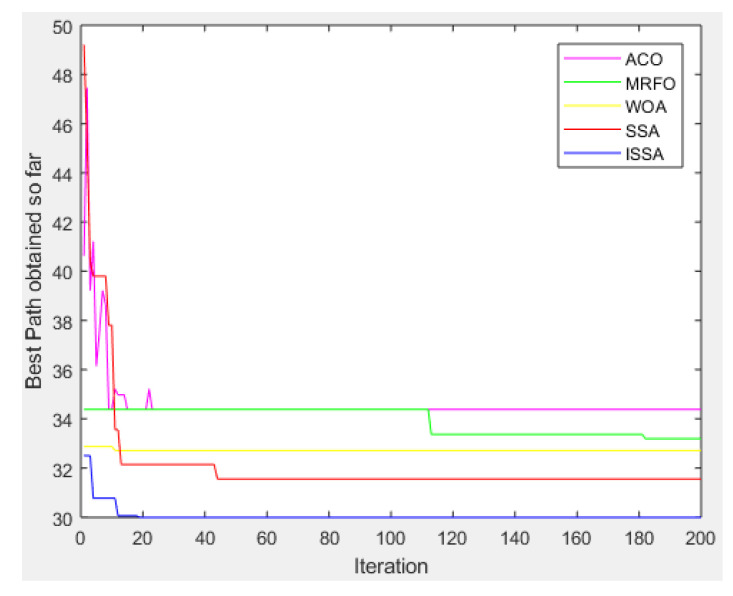
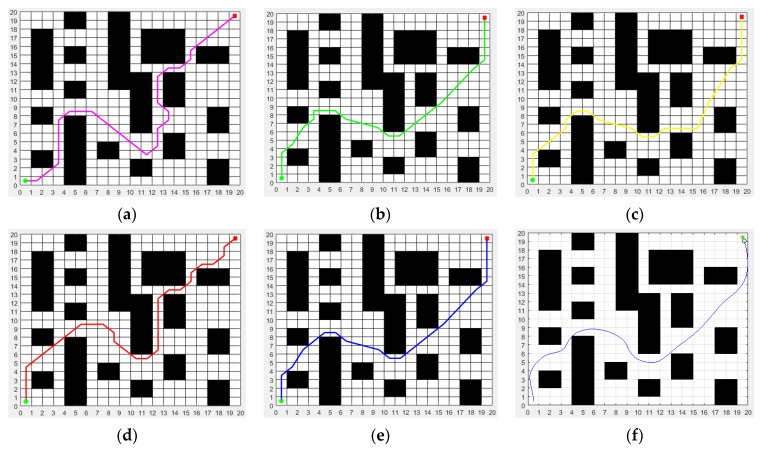
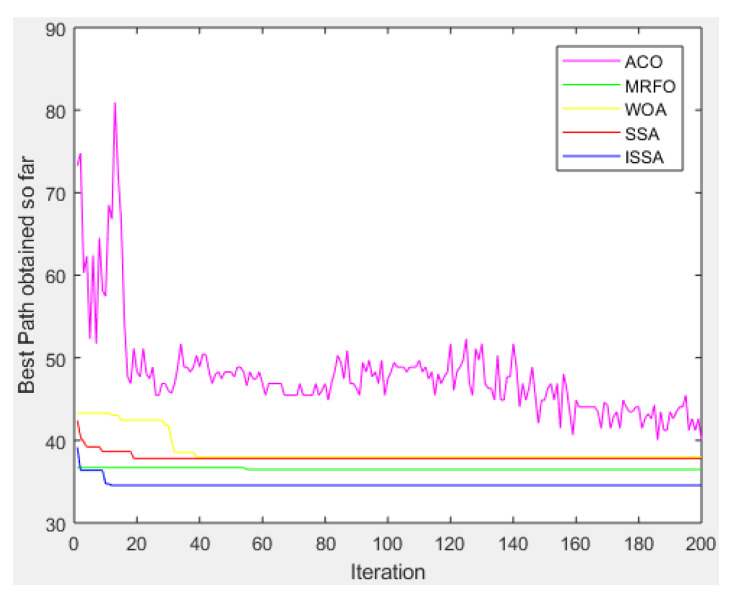
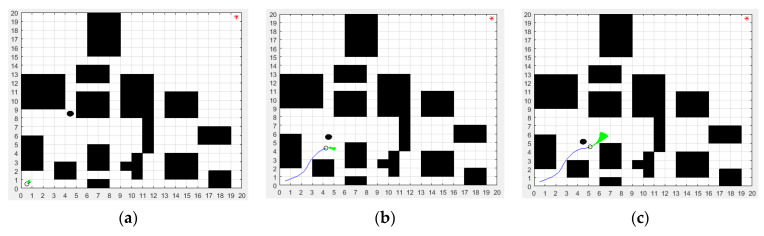
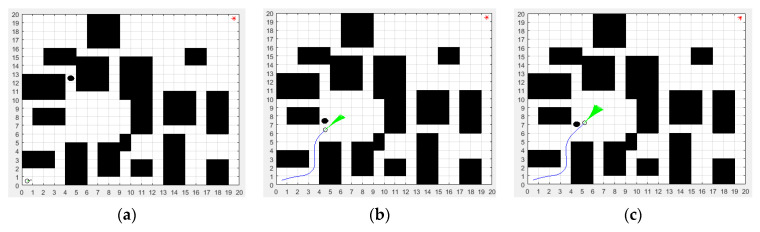
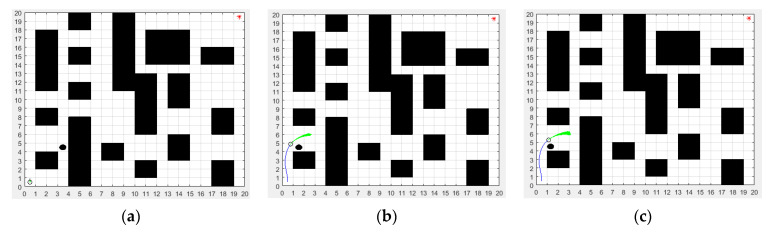
Aiming at the shortcomings of the traditional sparrow search algorithm (SSA) in path planning, such as its high time-consumption, long path length, it being easy to collide with static obstacles and its inability to avoid dynamic obstacles, this paper proposes a new improved SSA based on multi-strategies. Firstly, Cauchy reverse learning was used to initialize the sparrow population to avoid a premature convergence of the algorithm. Secondly, the sine-cosine algorithm was used to update the producers' position of the sparrow population and balance the global search and local exploration capabilities of the algorithm. Then, a Lévy flight strategy was used to update the scroungers' position to avoid the algorithm falling into the local optimum. Finally, the improved SSA and dynamic window approach (DWA) were combined to enhance the local obstacle avoidance ability of the algorithm. The proposed novel algorithm is named ISSA-DWA. Compared with the traditional SSA, the path length, path turning times and execution time planned by the ISSA-DWA are reduced by 13.42%, 63.02% and 51.35%, respectively, and the path smoothness is improved by 62.29%. The experimental results show that the ISSA-DWA proposed in this paper can not only solve the shortcomings of the SSA but can also plan a highly smooth path safely and efficiently in the complex dynamic obstacle environment.
Keywords: Cauchy reverse learning; Lévy flight strategy; dynamic window approach; path planning; sine–cosine algorithm; sparrow search algorithm.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Application of Improved Sparrow Search Algorithm to Path Planning of Mobile Robots.Biomimetics (Basel). 2024 Jun 11;9(6):351. doi: 10.3390/biomimetics9060351. Biomimetics (Basel). 2024. PMID: 38921231 Free PMC article.
-
An improved chaos sparrow search algorithm for UAV path planning.Sci Rep. 2024 Jan 3;14(1):366. doi: 10.1038/s41598-023-50484-8. Sci Rep. 2024. PMID: 38172279 Free PMC article.
-
An Improved Sparrow Search Algorithm and Its Application in HIFU Sound Field.Comput Intell Neurosci. 2023 Mar 3;2023:1228685. doi: 10.1155/2023/1228685. eCollection 2023. Comput Intell Neurosci. 2023. PMID: 36909963 Free PMC article.
-
Improved Sparrow Algorithm Based on Game Predatory Mechanism and Suicide Mechanism.Comput Intell Neurosci. 2022 May 16;2022:4925416. doi: 10.1155/2022/4925416. eCollection 2022. Comput Intell Neurosci. 2022. PMID: 35615547 Free PMC article. Review.
-
Recent Versions and Applications of Sparrow Search Algorithm.Arch Comput Methods Eng. 2023;30(5):2831-2858. doi: 10.1007/s11831-023-09887-z. Epub 2023 Feb 7. Arch Comput Methods Eng. 2023. PMID: 36777699 Free PMC article. Review.
Cited by
-
Multi-strategy cooperative enhancement dung beetle optimizer and its application in obstacle avoidance navigation.Sci Rep. 2024 Nov 14;14(1):28041. doi: 10.1038/s41598-024-79420-0. Sci Rep. 2024. PMID: 39543289 Free PMC article.
-
Bionic 3D Path Planning for Plant Protection UAVs Based on Swarm Intelligence Algorithms and Krill Swarm Behavior.Biomimetics (Basel). 2024 Jun 13;9(6):353. doi: 10.3390/biomimetics9060353. Biomimetics (Basel). 2024. PMID: 38921234 Free PMC article.
-
Perceiving like a Bat: Hierarchical 3D Geometric-Semantic Scene Understanding Inspired by a Biomimetic Mechanism.Biomimetics (Basel). 2023 Sep 19;8(5):436. doi: 10.3390/biomimetics8050436. Biomimetics (Basel). 2023. PMID: 37754187 Free PMC article.
-
Application of Multi-Strategy Controlled Rime Algorithm in Path Planning for Delivery Robots.Biomimetics (Basel). 2025 Jul 19;10(7):476. doi: 10.3390/biomimetics10070476. Biomimetics (Basel). 2025. PMID: 40710290 Free PMC article.
-
Application of the Improved Rapidly Exploring Random Tree Algorithm to an Insect-like Mobile Robot in a Narrow Environment.Biomimetics (Basel). 2023 Aug 17;8(4):374. doi: 10.3390/biomimetics8040374. Biomimetics (Basel). 2023. PMID: 37622979 Free PMC article.
References
-
- Zhu D.-D., Sun J.-Q. A New Algorithm Based on Dijkstra for Vehicle Path Planning Considering Intersection Attribute. IEEE Access. 2021;9:19761–19775. doi: 10.1109/ACCESS.2021.3053169. - DOI
-
- Zhang Z., Wu J., Dai J., He C. Optimal path planning with modified A-Star algorithm for stealth unmanned aerial vehicles in 3D network radar environment. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021;236:72–81. doi: 10.1177/09544100211007381. - DOI
-
- Wang Z., Sun H., Cai P., Lan X., Wu D. Multi-point traversal path planning of manipulator based on improved RRT algorithm; Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence; Shanghai, China. 20–22 September 2019.
-
- Cao K., Cheng Q., Gao S., Chen Y., Chen C. Improved PRM for Path Planning in Narrow Passages; Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA); Tianjin, China. 4–7 August 2019.
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
