

Development of a program to determine optimal settings for robot-assisted rehabilitation of the post-stroke paretic upper extremity: a simulation study
- PMID: 37280304
- PMCID: PMC10244345
- DOI: 10.1038/s41598-023-34556-3
Development of a program to determine optimal settings for robot-assisted rehabilitation of the post-stroke paretic upper extremity: a simulation study
Abstract
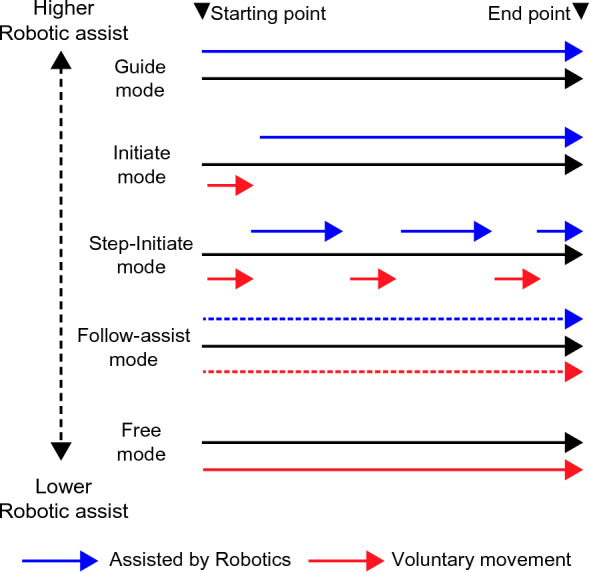
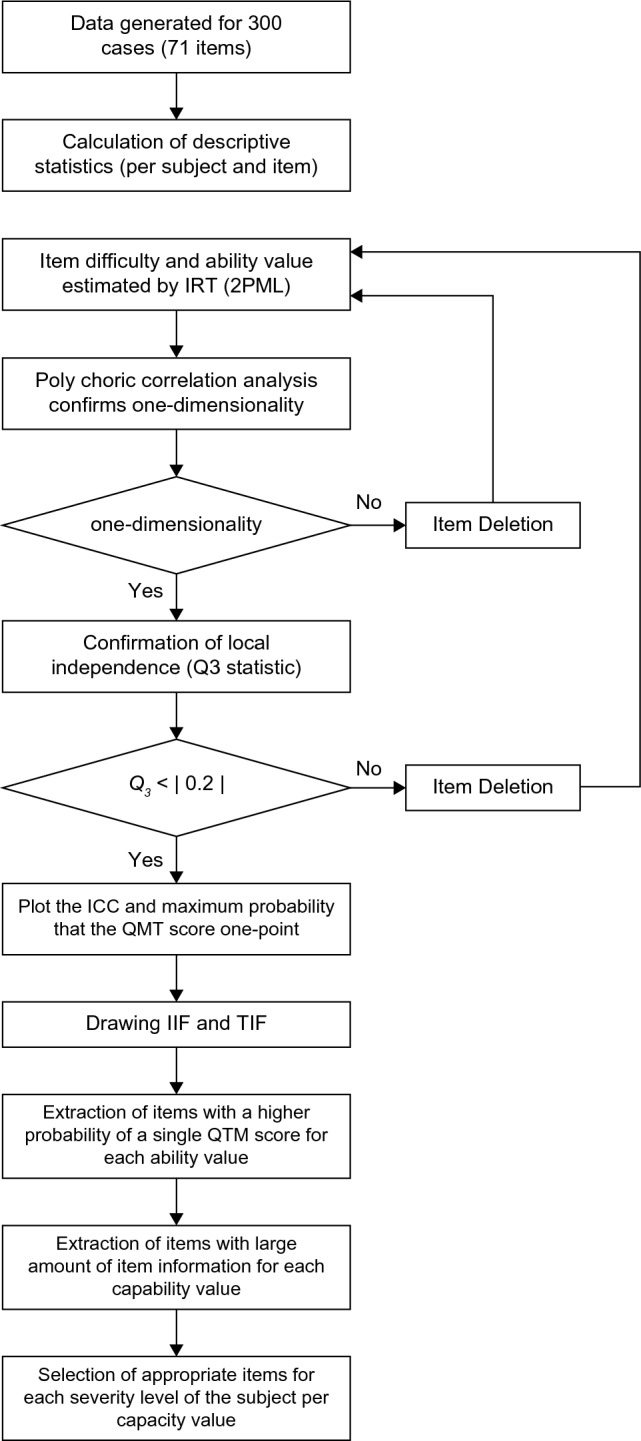
Robot-assisted therapy can effectively treat upper extremity (UE) paralysis in patients who experience a stroke. Presently, UE, as a training item, is selected according to the severity of the paralysis based on a clinician's experience. The possibility of objectively selecting robot-assisted training items based on the severity of paralysis was simulated using the two-parameter logistic model item response theory (2PLM-IRT). Sample data were generated using the Monte Carlo method with 300 random cases. This simulation analyzed sample data (categorical data with three difficulty values of 0, 1, and 2 [0: too easy, 1: adequate, and 2: too difficult]) with 71 items per case. First, the most appropriate method was selected to ensure the local independence of the sample data necessary to use 2PLM-IRT. The method was to exclude items with low response probability (maximum response probability) within a pair in the Quality of Compensatory Movement Score (QCM) 1-point item difficulty curve, items with low item information content within a pair in the QCM 1-point item difficulty curve, and items with low item discrimination. Second, 300 cases were analyzed to determine the most appropriate model (one-parameter or two-parameter item response therapy) to be used and the most favored method to establish local independence. We also examined whether robotic training items could be selected according to the severity of paralysis based on the ability of a person (θ) in the sample data as calculated by 2PLM-IRT. Excluding items with low response probability (maximum response probability) in a pair in the categorical data 1-point item difficulty curve was effective in ensuring local independence. Additionally, to ensure local independence, the number of items should be reduced to 61 from 71, indicating that the 2PLM-IRT was an appropriate model. The ability of a person (θ) calculated by 2PLM-IRT suggested that seven training items could be estimated from 300 cases according to severity. This simulation made it possible to objectively estimate the training items according to the severity of paralysis in a sample of approximately 300 cases using this model.
© 2023. The Author(s).
Conflict of interest statement
TT reports receiving personal fees from Teijin Pharma. OY reports no competing interest. KD reports non-financial support from Teijin Pharma. YU reports personal fees and non-financial support from Teijin Pharma.
Figures




Similar articles
-
Automatic setting optimization for robotic upper-extremity rehabilitation in patients with stroke using ReoGo-J: a cross-sectional clinical trial.Sci Rep. 2024 Oct 28;14(1):25710. doi: 10.1038/s41598-024-74672-2. Sci Rep. 2024. PMID: 39468163 Free PMC article. Clinical Trial.
-
Impact of the robotic-assistance level on upper extremity function in stroke patients receiving adjunct robotic rehabilitation: sub-analysis of a randomized clinical trial.J Neuroeng Rehabil. 2022 Feb 25;19(1):25. doi: 10.1186/s12984-022-00986-9. J Neuroeng Rehabil. 2022. PMID: 35216603 Free PMC article. Clinical Trial.
-
Dimensionality and item-difficulty hierarchy of the Fugl-Meyer assessment of the upper extremity among Japanese patients who have experienced stroke.Top Stroke Rehabil. 2022 Dec;29(8):579-587. doi: 10.1080/10749357.2021.1965797. Epub 2021 Aug 20. Top Stroke Rehabil. 2022. PMID: 34414858
-
Short and long-term effects of robot-assisted therapy on upper limb motor function and activity of daily living in patients post-stroke: a meta-analysis of randomized controlled trials.J Neuroeng Rehabil. 2022 Jul 21;19(1):76. doi: 10.1186/s12984-022-01058-8. J Neuroeng Rehabil. 2022. PMID: 35864524 Free PMC article. Review.
-
Combined transcranial Direct Current Stimulation and robot-assisted arm training in patients with stroke: a systematic review.Restor Neurol Neurosci. 2021;39(6):435-446. doi: 10.3233/RNN-211218. Restor Neurol Neurosci. 2021. PMID: 34974446
Cited by
-
Automatic setting optimization for robotic upper-extremity rehabilitation in patients with stroke using ReoGo-J: a cross-sectional clinical trial.Sci Rep. 2024 Oct 28;14(1):25710. doi: 10.1038/s41598-024-74672-2. Sci Rep. 2024. PMID: 39468163 Free PMC article. Clinical Trial.
-
An Optimized Stimulation Control System for Upper Limb Exoskeleton Robot-Assisted Rehabilitation Using a Fuzzy Logic-Based Pain Detection Approach.Sensors (Basel). 2024 Feb 6;24(4):1047. doi: 10.3390/s24041047. Sensors (Basel). 2024. PMID: 38400205 Free PMC article.
-
Optimizing lower limb rehabilitation: the intersection of machine learning and rehabilitative robotics.Front Rehabil Sci. 2024 Jan 26;5:1246773. doi: 10.3389/fresc.2024.1246773. eCollection 2024. Front Rehabil Sci. 2024. PMID: 38343790 Free PMC article. Review.
References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
