

A Torsion-Bending Antagonistic Bistable Actuator Enables Untethered Crawling and Swimming of Miniature Robots
- PMID: 37287890
- PMCID: PMC10243200
- DOI: 10.34133/research.0116
A Torsion-Bending Antagonistic Bistable Actuator Enables Untethered Crawling and Swimming of Miniature Robots
Abstract
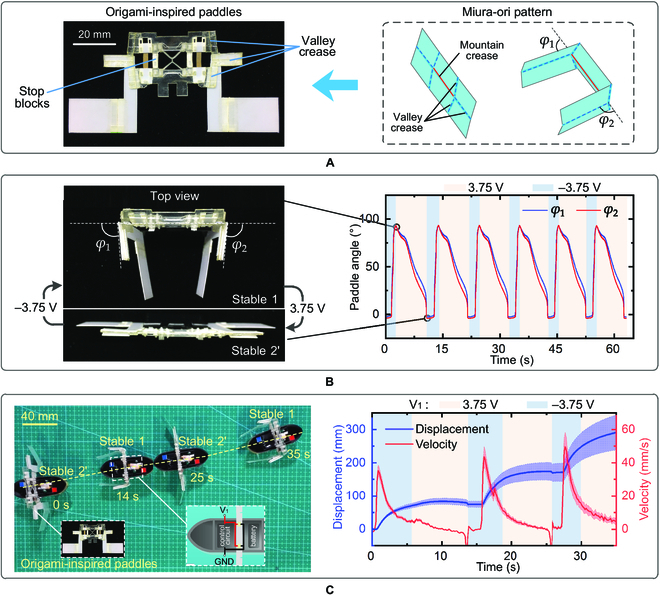
Miniature robots show great potential in exploring narrow and confined spaces to perform various tasks, but many applications are limited by the dependence of these robots on electrical or pneumatic tethers to power supplies outboard. Developing an onboard actuator that is small in size and powerful enough to carry all the components onboard is a major challenge to eliminate the need for a tether. Bistability can trigger a dramatic energy release during switching between the 2 stable states, thus providing a promising way to overcome the intrinsic limitation of insufficient power of small actuators. In this work, the antagonistic action between torsional deflection and bending deflection in a lamina emergent torsional joint is utilized to achieve bistability, yielding a buckling-free bistable design. The unique configuration of this bistable design enables integrating of a single bending electroactive artificial muscle in the structure to form a compact, self-switching bistable actuator. A low-voltage ionic polymer-metal composites artificial muscle is employed, yielding a bistable actuator capable of generating an instantaneous angular velocity exceeding 300 °/s by a 3.75-V voltage. Two untethered robotic demonstrations using the bistable actuator are presented, including a crawling robot (gross weight of 2.7 g, including actuator, battery, and on-board circuit) that can generate a maximum instantaneous velocity of 40 mm/s and a swimming robot equipped with a pair of origami-inspired paddles that swims breaststroke. The low-voltage bistable actuator shows potential for achieving autonomous motion of various fully untethered miniature robots.
Figures




References
-
- Tang C, Du B, Jiang S, Shao Q, Dong X, Liu XJ, Zhao H. A pipeline inspection robot for navigating tubular environments in the sub-centimeter scale. Sci Robot. 2022;7(66):Article eabm8597. - PubMed
-
- Hines L, Petersen K, Lum GZ, Sitti M. Soft actuators for small-scale robotics. Adv Mater. 2017;29: Article 1603483. - PubMed
-
- Ben E, Salem L, Or Y, Gat AD. Single-input control of multiple fluid-driven elastic actuators via interaction between bistability and viscosity. Soft Robot. 2020;7(2):259–265. - PubMed
-
- Pagano A, Yan T, Chien B, Wissa A, Tawfick S. A crawling robot driven by multi-stable origami. Smart Mater Struct. 2017;26: 094007.
LinkOut - more resources
Full Text Sources
