

This is a preprint.
Generalizing Stepping Concepts To Non-Straight Walking
- PMID: 37293042
- PMCID: PMC10245567
- DOI: 10.1101/2023.05.15.540644
Generalizing Stepping Concepts To Non-Straight Walking
Update in
-
Generalizing stepping concepts to non-straight walking.J Biomech. 2023 Dec;161:111840. doi: 10.1016/j.jbiomech.2023.111840. Epub 2023 Oct 19. J Biomech. 2023. PMID: 37897990 Free PMC article.
Abstract
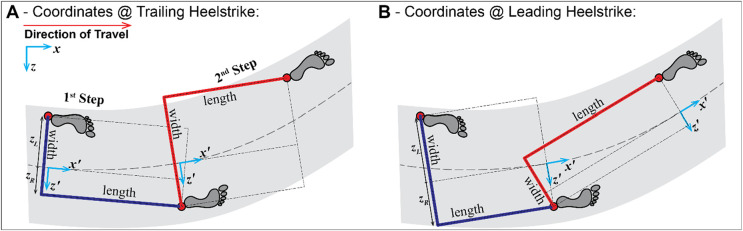
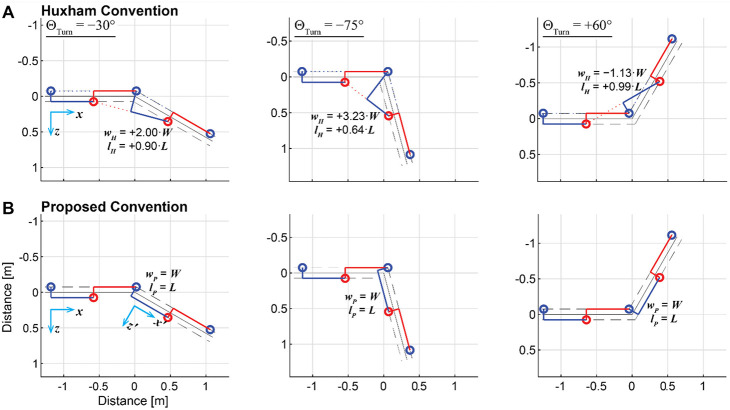
People rarely walk in straight lines. Instead, we make frequent turns or other maneuvers. Spatiotemporal parameters fundamentally characterize gait. For straight walking, these parameters are well-defined for that task of walking on a straight path. Generalizing these concepts to non-straight walking, however, is not straightforward. People also follow non-straight paths imposed by their environment (store aisle, sidewalk, etc.) or choose readily-predictable, stereotypical paths of their own. People actively maintain lateral position to stay on their path and readily adapt their stepping when their path changes. We therefore propose a conceptually coherent convention that defines step lengths and widths relative to known walking paths. Our convention simply re-aligns lab-based coordinates to be tangent to a walker's path at the mid-point between the two footsteps that define each step. We hypothesized this would yield results both more correct and more consistent with notions from straight walking. We defined several common non-straight walking tasks: single turns, lateral lane changes, walking on circular paths, and walking on arbitrary curvilinear paths. For each, we simulated idealized step sequences denoting "perfect" performance with known constant step lengths and widths. We compared results to path- independent alternatives. For each, we directly quantified accuracy relative to known true values. Results strongly confirmed our hypothesis. Our convention returned vastly smaller errors and introduced no artificial stepping asymmetries across all tasks. All results for our convention rationally generalized concepts from straight walking. Taking walking paths explicitly into account as important task goals themselves thus resolves conceptual ambiguities of prior approaches.
Keywords: Goal-Directed Walking; Step Length; Step Width; Stepping; Walking.
Conflict of interest statement
Declaration of Competing Interest The authors declare that there are no conflicts of interest associated with this work.
Figures






References
-
- Acasio J., Wu M.M., Fey N.P., Gordon K.E., 2017. Stability-maneuverability trade-offs during lateral steps. Gait Posture 52, 171–177. - PubMed
-
- Ambrose A.F., Paul G., Hausdorff J.M., 2013. Risk factors for falls among older adults: A review of the literature. Maturitas 75, 51–61. - PubMed
-
- Arechavaleta G., Laumond J.P., Hicheur H., Berthoz A., 2008. An Optimality Principle Governing Human Walking. IEEE Trans Robot. 24, 5–14.
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous