

Automatic patient positioning based on robot rotational workspace for extended reality
- PMID: 37296352
- PMCID: PMC10589133
- DOI: 10.1007/s11548-023-02967-2
Automatic patient positioning based on robot rotational workspace for extended reality
Abstract
Purpose: Understanding the properties and aspects of the robotic system is essential to a successful medical intervention, as different capabilities and limits characterize each. Robot positioning is a crucial step in the surgical setup that ensures proper reachability to the desired port locations and facilitates docking procedures. This very demanding task requires much experience to master, especially with multiple trocars, increasing the barrier of entry for surgeons in training.
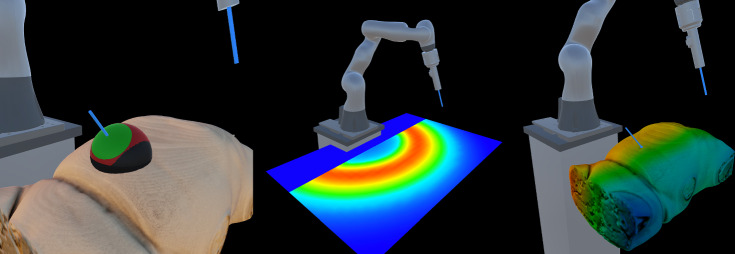
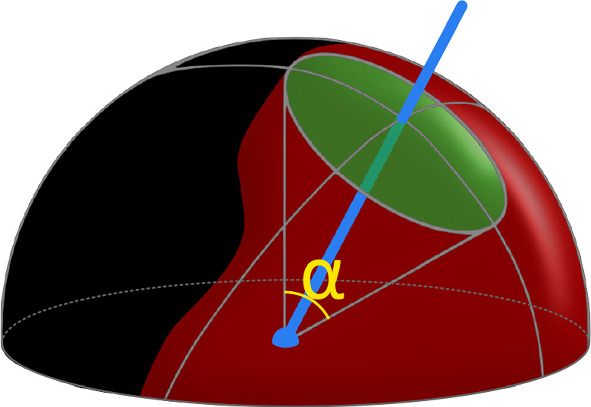
Methods: Previously, we demonstrated an Augmented Reality-based system to visualize the rotational workspace of the robotic system and proved it helps the surgical staff to optimize patient positioning for single-port interventions. In this work, we implemented a new algorithm to allow for an automatic, real-time robotic arm positioning for multiple ports.
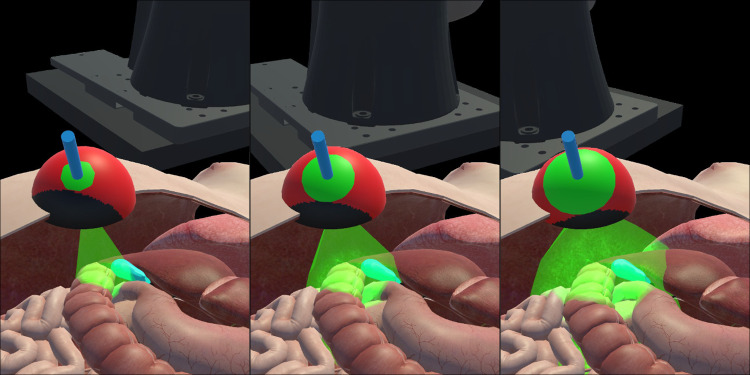
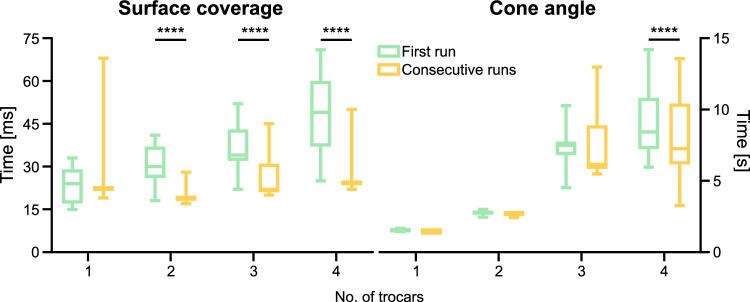
Results: Our system, based on the rotational workspace data of the robotic arm and the set of trocar locations, can calculate the optimal position of the robotic arm in milliseconds for the positional and in seconds for the rotational workspace in virtual and augmented reality setups.
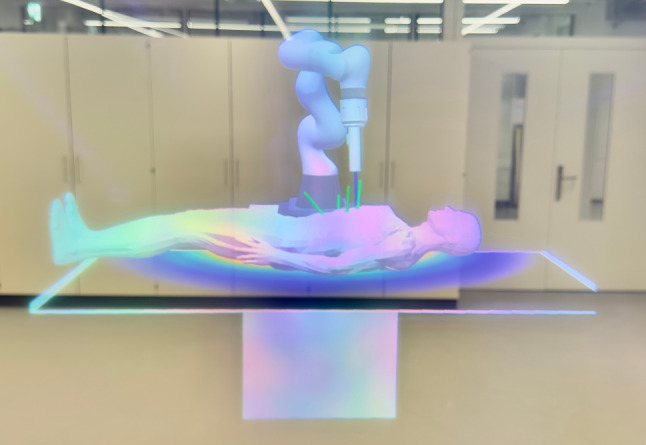
Conclusions: Following the previous work, we extended our system to support multiple ports to cover a broader range of surgical procedures and introduced the automatic positioning component. Our solution can decrease the surgical setup time and eliminate the need to repositioning the robot mid-procedure and is suitable both for the preoperative planning step using VR and in the operating room-running on an AR headset.
Keywords: Augmented reality; Computer-assisted surgery; Patient positioning.
© 2023. The Author(s).
Conflict of interest statement
The authors declare that they have no conflict of interest.
Figures

References
-
- Binbosayes A (2018) Comparison between laparoendoscopic single-site surgery and the conventional total extraperitoneal technique in adult patients for inguinal hernia repair concerning postoperative pain, complications, and cosmesis: A literature review. MOJ Surgery. 10.15406/mojs.2018.06.00135 - DOI
-
- Cho G, Yoo T, Chang W (2021) Robotic cholecystectomy with a new port placement–is it really beneficial? Asian J Surg - PubMed
-
- Croci DM, Guzman R, Netzer C, Mariani L, Schaeren S, Cattin PC, Jost GF (2020) Novel patient-specific 3d-virtual reality visualisation software (spectovr) for the planning of spine surgery: a case series of eight patients. BMJ Innov 6(4)
LinkOut - more resources
Full Text Sources
Research Materials
