

This is a preprint.
A Transient High-dimensional Geometry Affords Stable Conjunctive Subspaces for Efficient Action Selection
- PMID: 37333209
- PMCID: PMC10274903
- DOI: 10.1101/2023.06.09.544428
A Transient High-dimensional Geometry Affords Stable Conjunctive Subspaces for Efficient Action Selection
Update in
-
A transient high-dimensional geometry affords stable conjunctive subspaces for efficient action selection.Nat Commun. 2024 Oct 1;15(1):8513. doi: 10.1038/s41467-024-52777-6. Nat Commun. 2024. PMID: 39353961 Free PMC article.
Abstract
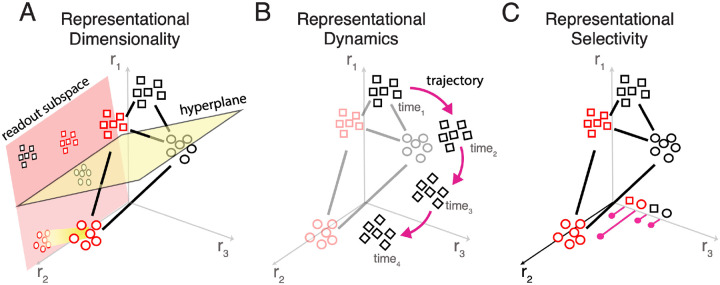
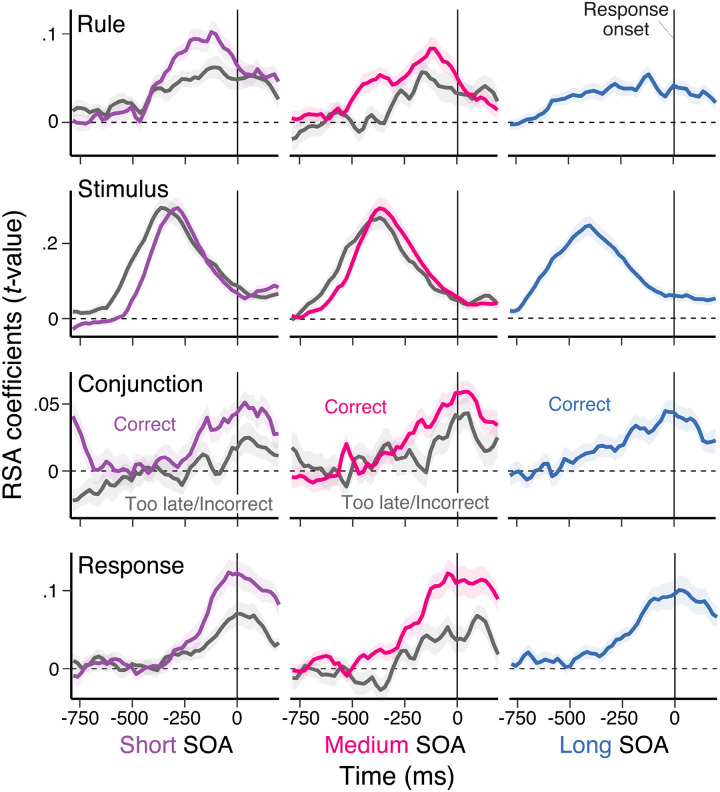
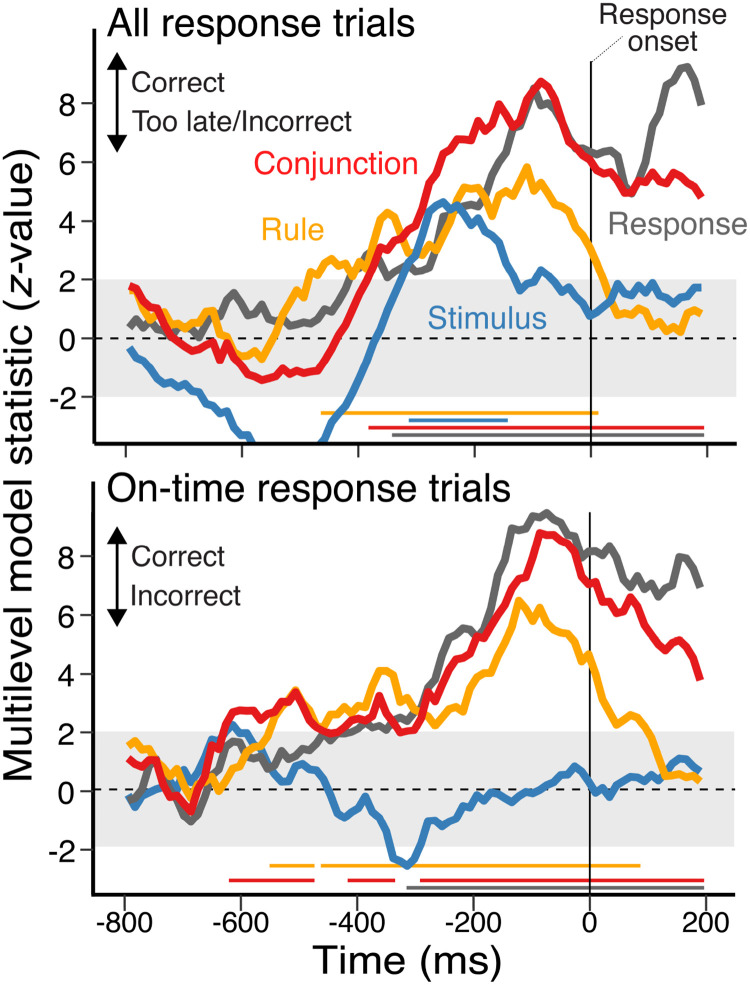
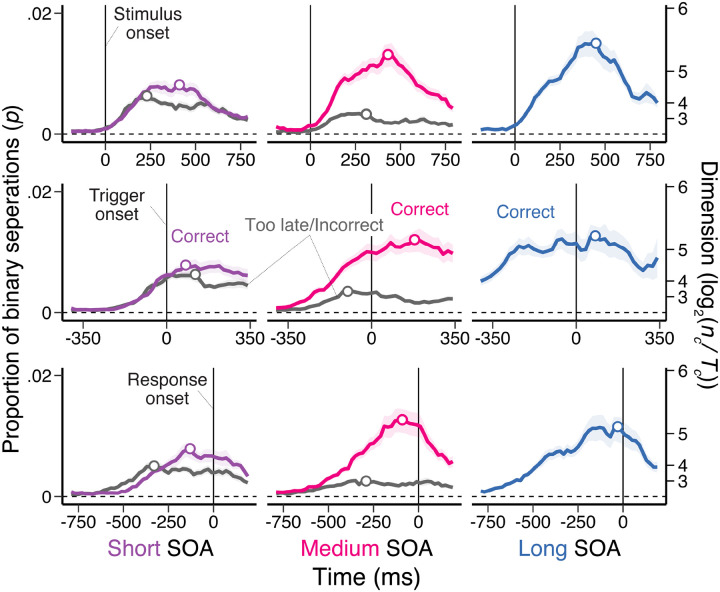
Flexible action selection requires cognitive control mechanisms capable of mapping the same inputs to different output actions depending on the context. From a neural state-space perspective, this requires a control representation that separates similar input neural states by context. Additionally, for action selection to be robust and time-invariant, information must be stable in time, enabling efficient readout. Here, using EEG decoding methods, we investigate how the geometry and dynamics of control representations constrain flexible action selection in the human brain. Participants performed a context-dependent action selection task. A forced response procedure probed action selection different states in neural trajectories. The result shows that before successful responses, there is a transient expansion of representational dimensionality that separated conjunctive subspaces. Further, the dynamics stabilizes in the same time window, with entry into this stable, high-dimensional state predictive of individual trial performance. These results establish the neural geometry and dynamics the human brain needs for flexible control over behavior.
Conflict of interest statement
Competing Interests The authors declare no competing interests.
Figures



References
-
- Asaad W. F., Rainer G., & Miller E. K. (2000). Task-specific neural activity in the primate prefrontal cortex. Journal of Neurophysiology, 84(1), 451–459. - PubMed
-
- Badre D., Frank M. J., & Moore C. I. (2015). Interactionist Neuroscience. Neuron, 88(5), 855–860. - PubMed
-
- Bagur S., Bourg J., Kempf A., Tarpin T., Bergaoui K., Guo Y., Ceballo S., Schwenkgrub J., Puel J. L., Bourien J., & Bathellier B. (2022). Emergence of a time-independent population code in auditory cortex enables sound categorization and discrimination learning. In bioRxiv (p. 2022.12.14.520391). 10.1101/2022.12.14.520391 - DOI
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources