

Changes in Distance between a Wearable Robotic Exoskeleton User and Four-Wheeled Walker during Gait in Level and Slope Conditions: Implications for Fall Prevention Systems
- PMID: 37366808
- PMCID: PMC10296616
- DOI: 10.3390/biomimetics8020213
Changes in Distance between a Wearable Robotic Exoskeleton User and Four-Wheeled Walker during Gait in Level and Slope Conditions: Implications for Fall Prevention Systems
Abstract
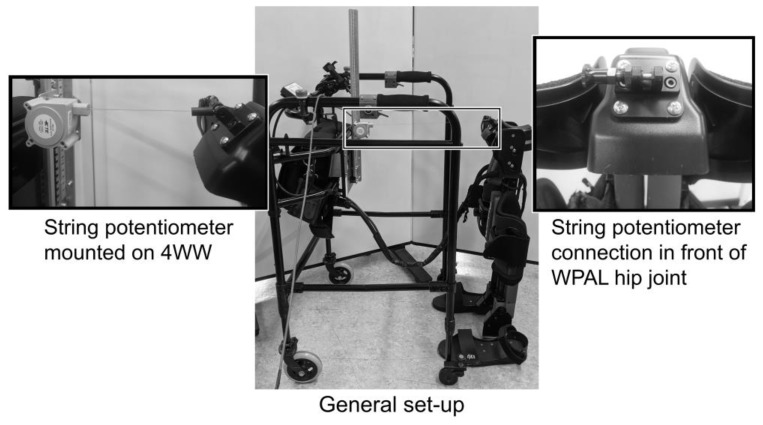
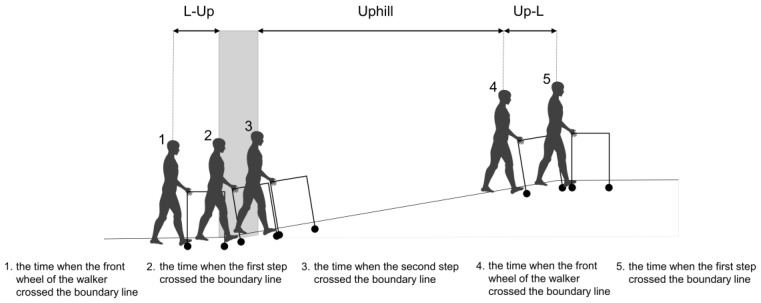
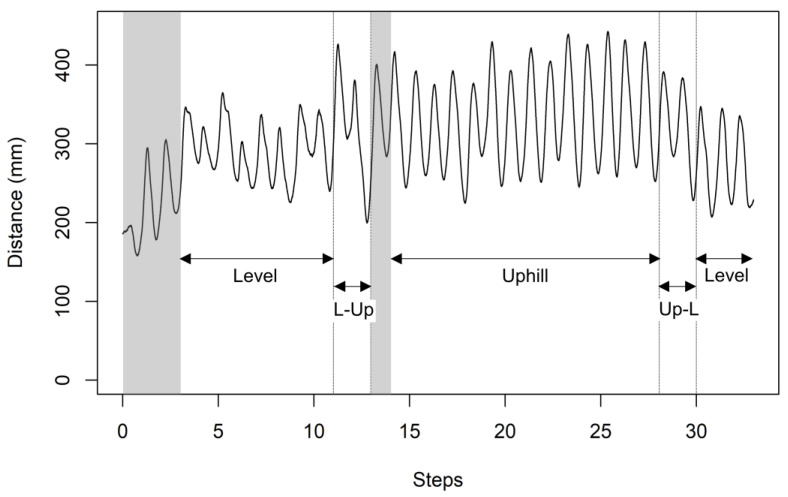
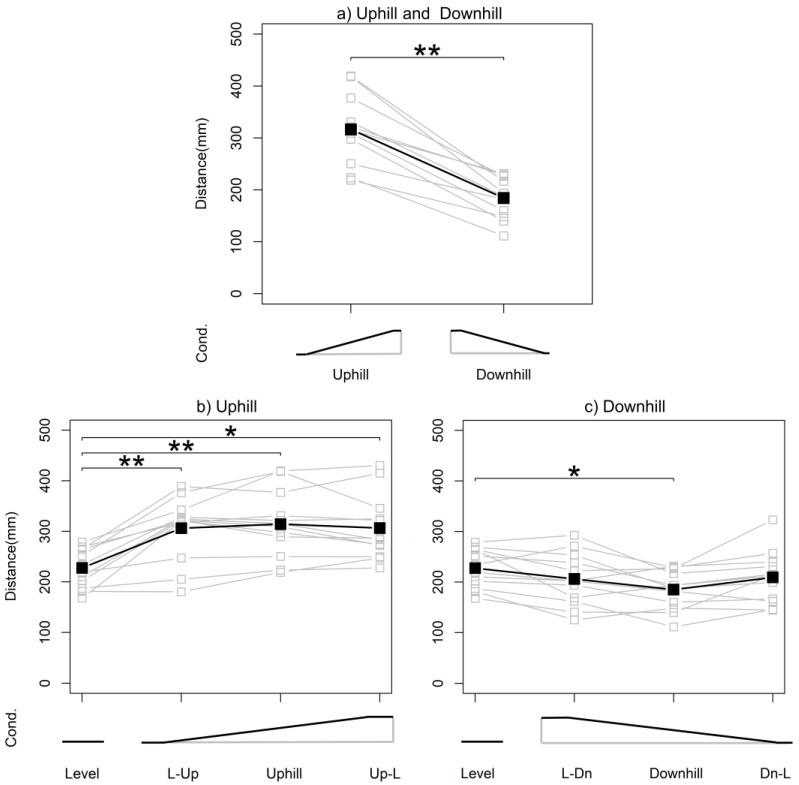
When walking with wearable robotic exoskeletons (WRE) in people with spinal cord injury, the distance between the user and the walker is one of the most important perspectives for ensuring safety. The purpose of this study was to clarify the distance between WRE users and four-wheeled walkers (4WW) while walking on level and sloping surfaces. To eliminate the effects of variation in neurological conditions, 12 healthy subjects participated. All participants ambulated using the WRE and the 4WW on level and sloping surfaces. The outcomes were the mean distances between the WRE users and the 4WWs in the level and slope conditions. To examine the influence of uphill and downhill slopes on distance, comparisons were conducted between the uphill or downhill conditions and the respective transitional periods. In the uphill condition, the mean distances were significantly greater than that in the level condition. Conversely, the mean distance moving downhill was significantly shorter than that in the level condition. Changes in the distance between the WRE user and the 4WW might increase the risk of falling forward on an uphill slope and backward on a downhill slope. This study's results will assist in developing a new feedback system to prevent falls.
Keywords: assistive device; fall prevention; gait training; powered exoskeleton; rehabilitation robotics; slope.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- James S.L., Theadom A., Ellenbogen R.G., Bannick M.S., Montjoy-Venning W., Lucchesi L.R., Abbasi N., Abdulkader R., Abraha H.N., Adsuar J.C., et al. Global, regional, and national burden of traumatic brain injury and spinal cord injury, 1990–2016: A systematic analysis for the Global Burden of Disease Study 2016. Lancet Neurol. 2019;18:56–87. doi: 10.1016/S1474-4422(18)30415-0. - DOI - PMC - PubMed
-
- Simpson K., Jiang P., Shewokis P., Odum S., Reeves K. Kinematic and plantar pressure adjustments to downhill gradients during gait. Gait Posture. 1993;1:172–179. doi: 10.1016/0966-6362(93)90060-E. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
