

Remapping in a recurrent neural network model of navigation and context inference
- PMID: 37410093
- PMCID: PMC10328512
- DOI: 10.7554/eLife.86943
Remapping in a recurrent neural network model of navigation and context inference
Abstract
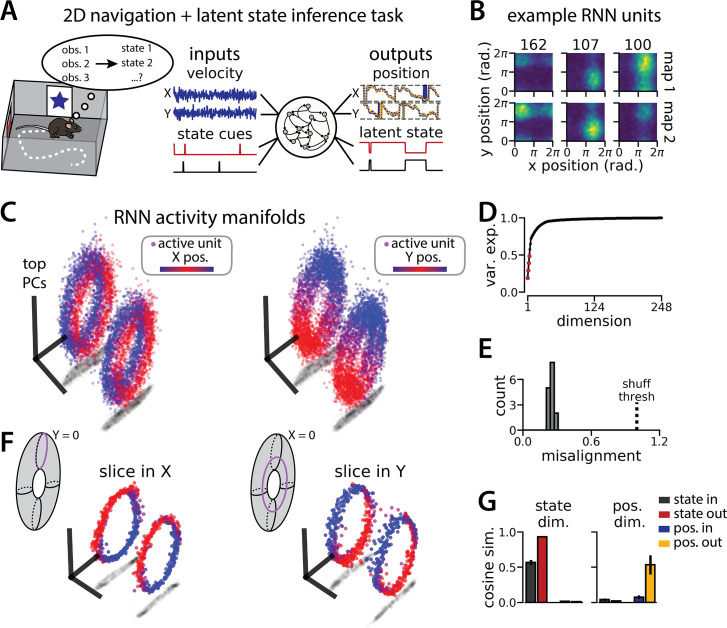
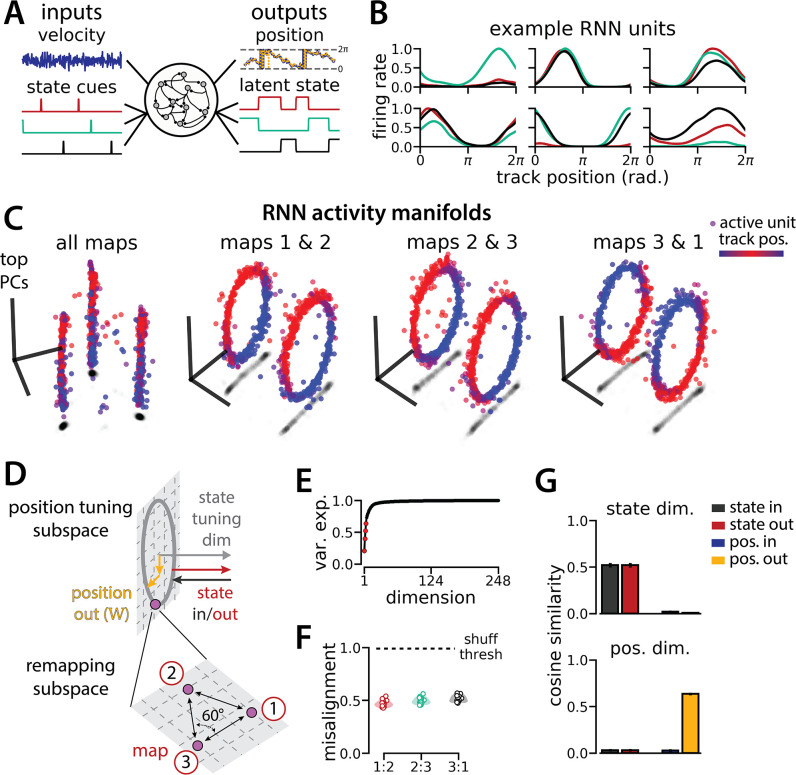
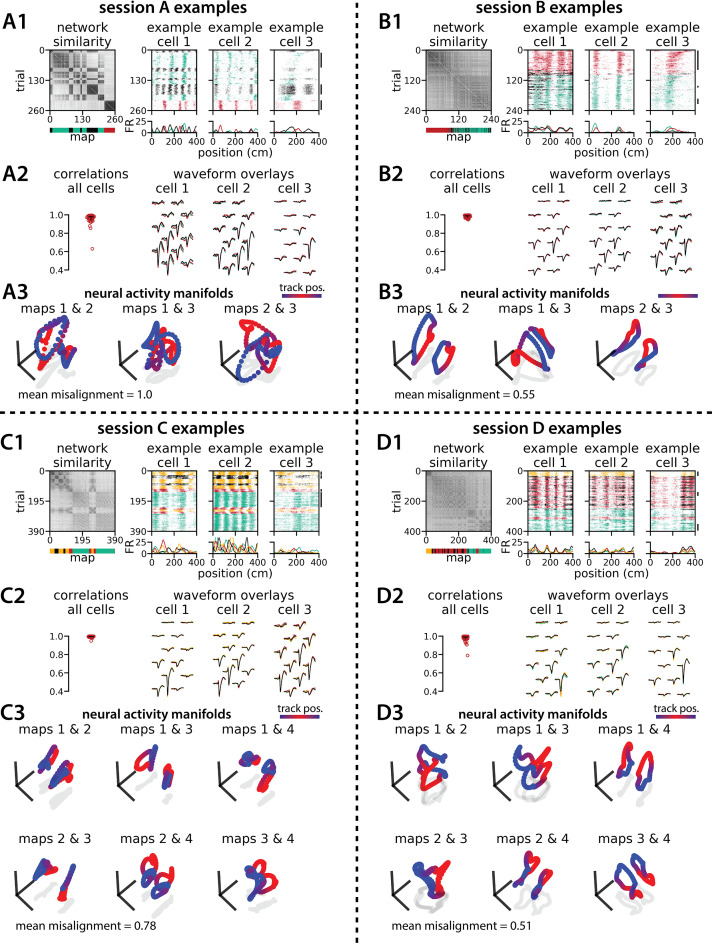
Neurons in navigational brain regions provide information about position, orientation, and speed relative to environmental landmarks. These cells also change their firing patterns ('remap') in response to changing contextual factors such as environmental cues, task conditions, and behavioral states, which influence neural activity throughout the brain. How can navigational circuits preserve their local computations while responding to global context changes? To investigate this question, we trained recurrent neural network models to track position in simple environments while at the same time reporting transiently-cued context changes. We show that these combined task constraints (navigation and context inference) produce activity patterns that are qualitatively similar to population-wide remapping in the entorhinal cortex, a navigational brain region. Furthermore, the models identify a solution that generalizes to more complex navigation and inference tasks. We thus provide a simple, general, and experimentally-grounded model of remapping as one neural circuit performing both navigation and context inference.
Keywords: Recurrent neural network models; attractor manifolds; dynamic coding; latent state; medial entorhinal cortex; mouse; navigation; neuroscience.
© 2023, Low et al.
Conflict of interest statement
IL, LG, AW No competing interests declared
Figures







Update of
-
Remapping in a recurrent neural network model of navigation and context inference.bioRxiv [Preprint]. 2023 May 4:2023.01.25.525596. doi: 10.1101/2023.01.25.525596. bioRxiv. 2023. Update in: Elife. 2023 Jul 06;12:RP86943. doi: 10.7554/eLife.86943. PMID: 36747825 Free PMC article. Updated. Preprint.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
