

High-Dynamic-Range Tone Mapping in Intelligent Automotive Systems
- PMID: 37420931
- PMCID: PMC10304969
- DOI: 10.3390/s23125767
High-Dynamic-Range Tone Mapping in Intelligent Automotive Systems
Abstract
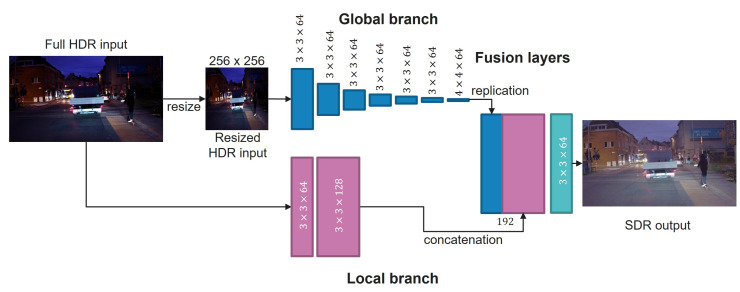
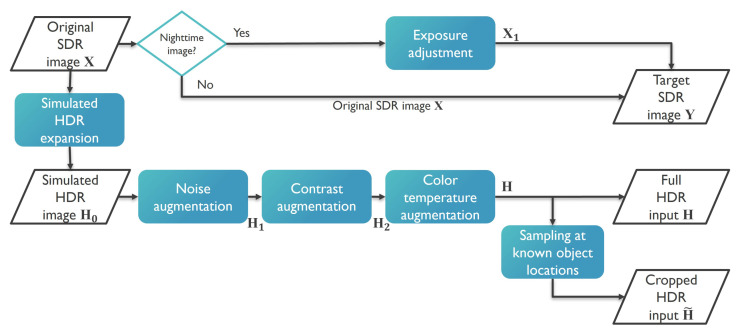
Intelligent driver assistance systems are becoming increasingly popular in modern passenger vehicles. A crucial component of intelligent vehicles is the ability to detect vulnerable road users (VRUs) for an early and safe response. However, standard imaging sensors perform poorly in conditions of strong illumination contrast, such as approaching a tunnel or at night, due to their dynamic range limitations. In this paper, we focus on the use of high-dynamic-range (HDR) imaging sensors in vehicle perception systems and the subsequent need for tone mapping of the acquired data into a standard 8-bit representation. To our knowledge, no previous studies have evaluated the impact of tone mapping on object detection performance. We investigate the potential for optimizing HDR tone mapping to achieve a natural image appearance while facilitating object detection of state-of-the-art detectors designed for standard dynamic range (SDR) images. Our proposed approach relies on a lightweight convolutional neural network (CNN) that tone maps HDR video frames into a standard 8-bit representation. We introduce a novel training approach called detection-informed tone mapping (DI-TM) and evaluate its performance with respect to its effectiveness and robustness in various scene conditions, as well as its performance relative to an existing state-of-the-art tone mapping method. The results show that the proposed DI-TM method achieves the best results in terms of detection performance metrics in challenging dynamic range conditions, while both methods perform well in typical, non-challenging conditions. In challenging conditions, our method improves the detection F2 score by 13%. Compared to SDR images, the increase in F2 score is 49%.
Keywords: autonomous driving; deep learning; high dynamic range; object detection; tone mapping.
Conflict of interest statement
The authors declare no conflict of interest.
Figures





Similar articles
-
Deep Learning Tone-Mapping and Demosaicing for Automotive Vision Systems.Sensors (Basel). 2023 Oct 17;23(20):8507. doi: 10.3390/s23208507. Sensors (Basel). 2023. PMID: 37896600 Free PMC article.
-
Exploiting Light Polarization for Deep HDR Imaging from a Single Exposure.Sensors (Basel). 2023 Jun 6;23(12):5370. doi: 10.3390/s23125370. Sensors (Basel). 2023. PMID: 37420537 Free PMC article.
-
High Dynamic Range Image Reconstruction from Saturated Images of Metallic Objects.J Imaging. 2024 Apr 15;10(4):92. doi: 10.3390/jimaging10040092. J Imaging. 2024. PMID: 38667990 Free PMC article.
-
A Study on Data Selection for Object Detection in Various Lighting Conditions for Autonomous Vehicles.J Imaging. 2024 Jun 22;10(7):153. doi: 10.3390/jimaging10070153. J Imaging. 2024. PMID: 39057724 Free PMC article.
-
Deep HDR Hallucination for Inverse Tone Mapping.Sensors (Basel). 2021 Jun 11;21(12):4032. doi: 10.3390/s21124032. Sensors (Basel). 2021. PMID: 34208062 Free PMC article.
Cited by
-
Deep Learning Tone-Mapping and Demosaicing for Automotive Vision Systems.Sensors (Basel). 2023 Oct 17;23(20):8507. doi: 10.3390/s23208507. Sensors (Basel). 2023. PMID: 37896600 Free PMC article.
-
Overview of High-Dynamic-Range Image Quality Assessment.J Imaging. 2024 Sep 27;10(10):243. doi: 10.3390/jimaging10100243. J Imaging. 2024. PMID: 39452406 Free PMC article. Review.
-
Vehicular Sensing for Improved Urban Mobility.Sensors (Basel). 2024 Aug 8;24(16):5134. doi: 10.3390/s24165134. Sensors (Basel). 2024. PMID: 39204831 Free PMC article.
References
-
- Macek K. Pedestrian Traffic Fatalities by State: 2021 Preliminary Data. Governors Highway Safety Association (GHSA); Washington, DC, USA: 2022. Technical Report.
-
- NHTSA’s National Center for Statistics and Analysis . Pedestrians: 2017 Data. Traffic Safety Facts Report No. DOT HS 812 681. U.S. Department of Transportation; Washington, DC, USA: 2019.
-
- Kalra N., Paddock S.M. Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? Transp. Res. Part A Policy Pract. 2016;94:182–193. doi: 10.1016/j.tra.2016.09.010. - DOI
-
- Di X., Shi R. A survey on autonomous vehicle control in the era of mixed-autonomy: From physics-based to AI-guided driving policy learning. Transp. Res. Part C Emerg. Technol. 2021;125:103008. doi: 10.1016/j.trc.2021.103008. - DOI
LinkOut - more resources
Full Text Sources
Miscellaneous
