

Predictive power of non-identifiable models
- PMID: 37429934
- PMCID: PMC10333263
- DOI: 10.1038/s41598-023-37939-8
Predictive power of non-identifiable models
Abstract
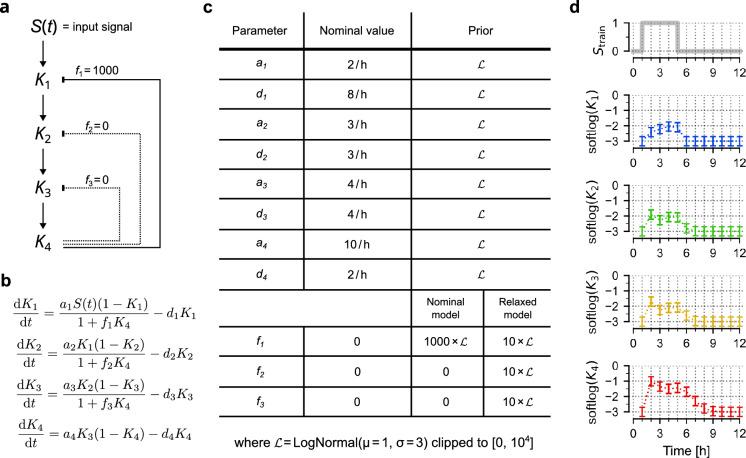
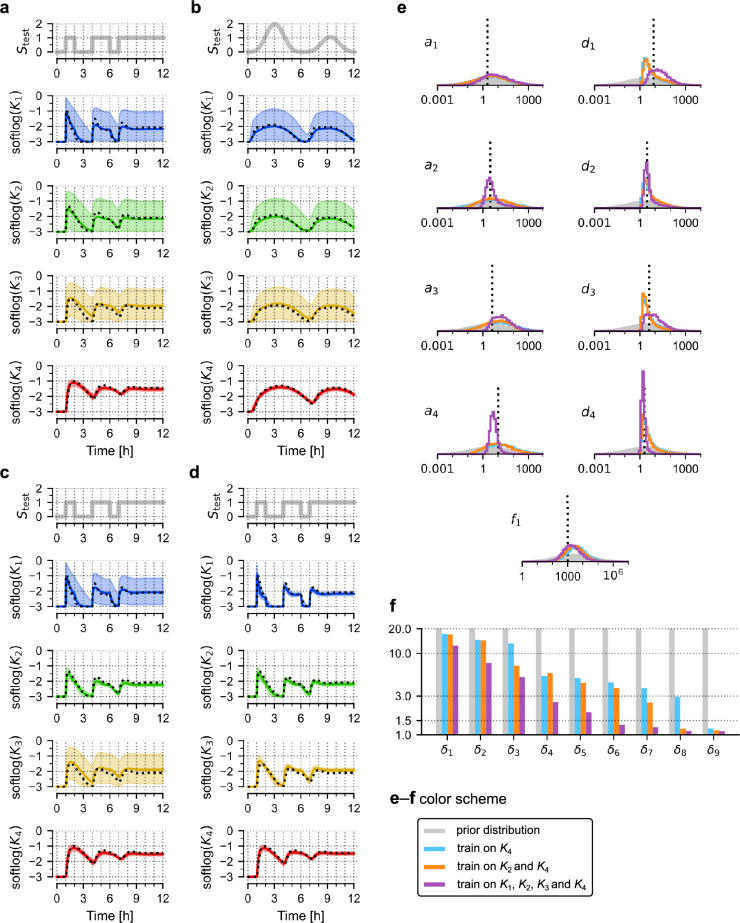
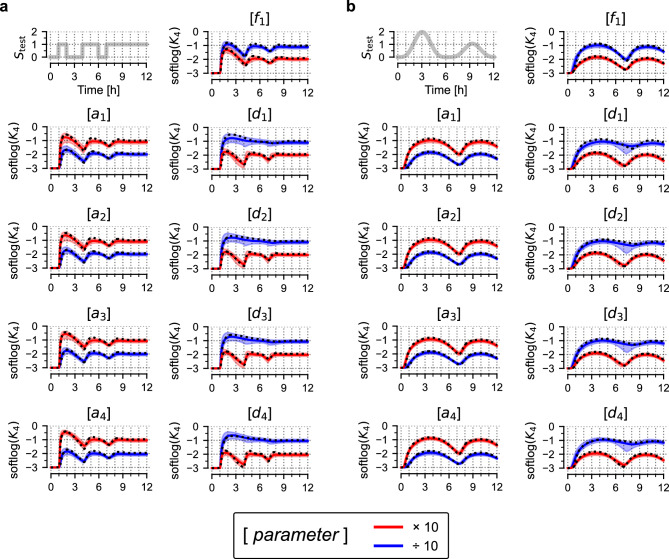
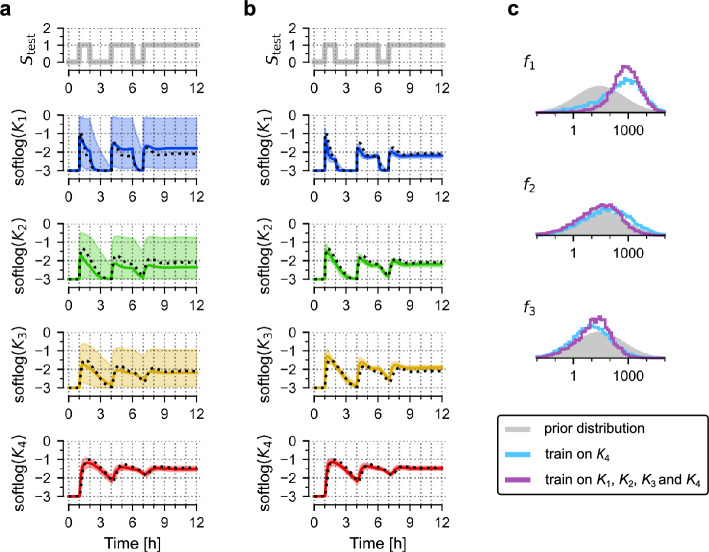
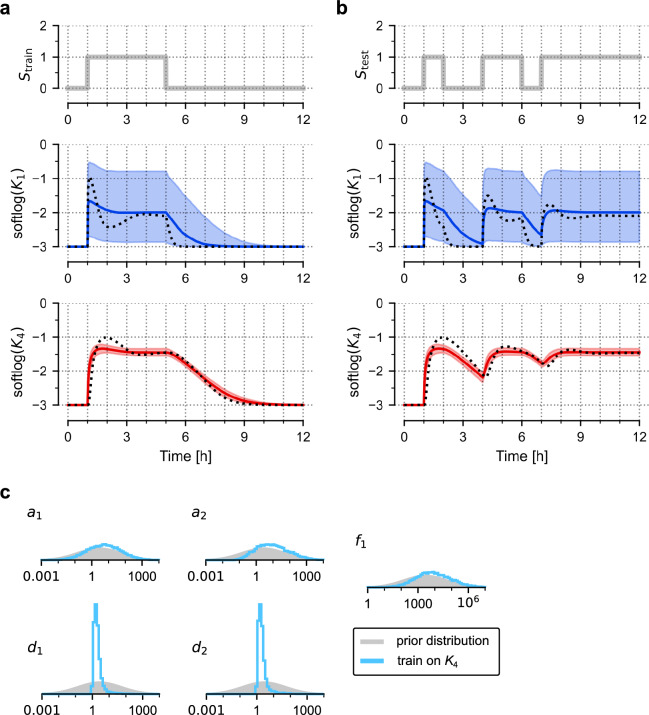
Resolving practical non-identifiability of computational models typically requires either additional data or non-algorithmic model reduction, which frequently results in models containing parameters lacking direct interpretation. Here, instead of reducing models, we explore an alternative, Bayesian approach, and quantify the predictive power of non-identifiable models. We considered an example biochemical signalling cascade model as well as its mechanical analogue. For these models, we demonstrated that by measuring a single variable in response to a properly chosen stimulation protocol, the dimensionality of the parameter space is reduced, which allows for predicting the measured variable's trajectory in response to different stimulation protocols even if all model parameters remain unidentified. Moreover, one can predict how such a trajectory will transform in the case of a multiplicative change of an arbitrary model parameter. Successive measurements of remaining variables further reduce the dimensionality of the parameter space and enable new predictions. We analysed potential pitfalls of the proposed approach that can arise when the investigated model is oversimplified, incorrect, or when the training protocol is inadequate. The main advantage of the suggested iterative approach is that the predictive power of the model can be assessed and practically utilised at each step.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures

References
-
- Wieland F-G, Hauber AL, Rosenblatt M, Tönsing C, Timmer J. On structural and practical identifiability. Curr. Opin. Syst. Biol. 2021;25:60–69. doi: 10.1016/j.coisb.2021.03.005. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
