

Detection of Defective Lettuce Seedlings Grown in an Indoor Environment under Different Lighting Conditions Using Deep Learning Algorithms
- PMID: 37447645
- PMCID: PMC10346403
- DOI: 10.3390/s23135790
Detection of Defective Lettuce Seedlings Grown in an Indoor Environment under Different Lighting Conditions Using Deep Learning Algorithms
Abstract
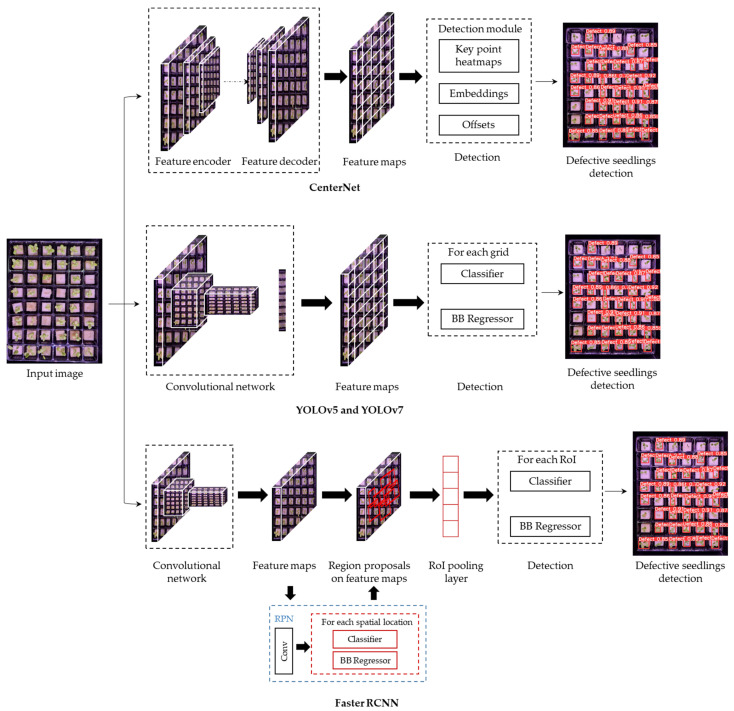
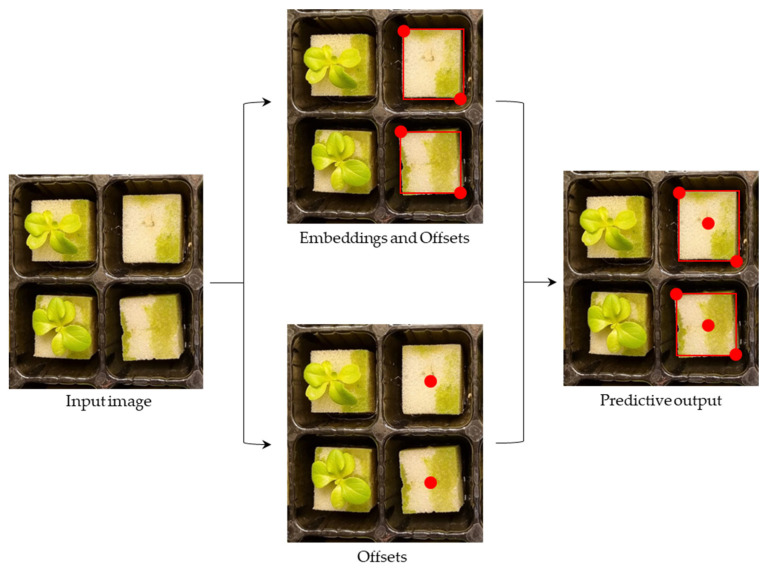
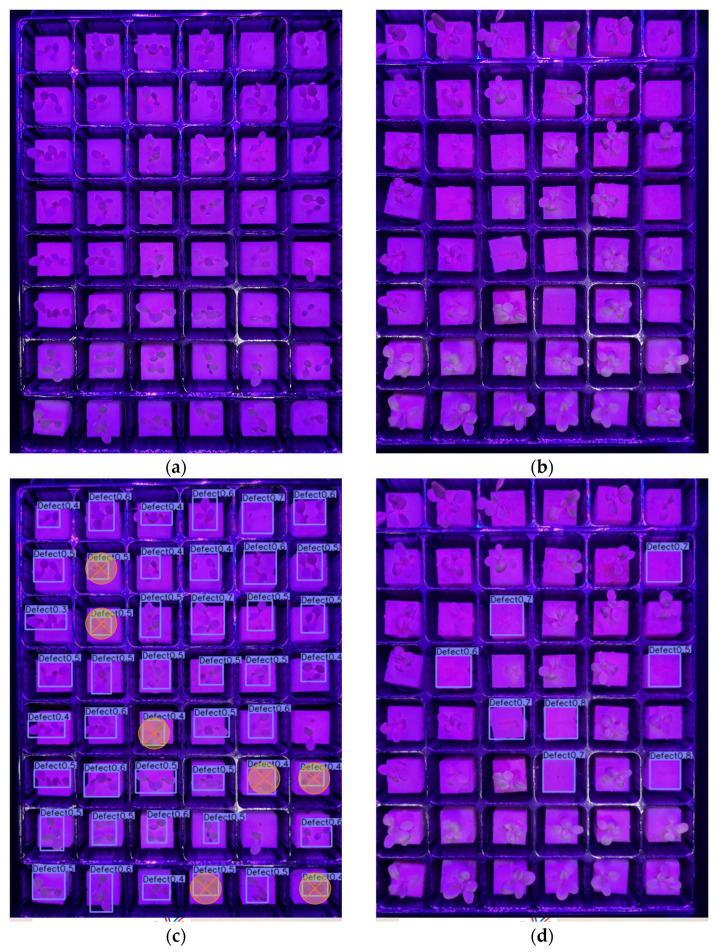
Sorting seedlings is laborious and requires attention to identify damage. Separating healthy seedlings from damaged or defective seedlings is a critical task in indoor farming systems. However, sorting seedlings manually can be challenging and time-consuming, particularly under complex lighting conditions. Different indoor lighting conditions can affect the visual appearance of the seedlings, making it difficult for human operators to accurately identify and sort the seedlings consistently. Therefore, the objective of this study was to develop a defective-lettuce-seedling-detection system under different indoor cultivation lighting systems using deep learning algorithms to automate the seedling sorting process. The seedling images were captured under different indoor lighting conditions, including white, blue, and red. The detection approach utilized and compared several deep learning algorithms, specifically CenterNet, YOLOv5, YOLOv7, and faster R-CNN to detect defective seedlings in indoor farming environments. The results demonstrated that the mean average precision (mAP) of YOLOv7 (97.2%) was the highest and could accurately detect defective lettuce seedlings compared to CenterNet (82.8%), YOLOv5 (96.5%), and faster R-CNN (88.6%). In terms of detection under different light variables, YOLOv7 also showed the highest detection rate under white and red/blue/white lighting. Overall, the detection of defective lettuce seedlings by YOLOv7 shows great potential for introducing automated seedling-sorting systems and classification under actual indoor farming conditions. Defective-seedling-detection can improve the efficiency of seedling-management operations in indoor farming.
Keywords: CenterNet; YOLO; deep learning; faster RCNN; indoor farming; lettuce; seedling detection.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
















Similar articles
-
Sooty Mold Detection on Citrus Tree Canopy Using Deep Learning Algorithms.Sensors (Basel). 2023 Oct 17;23(20):8519. doi: 10.3390/s23208519. Sensors (Basel). 2023. PMID: 37896610 Free PMC article.
-
Detection of Tip-Burn Stress on Lettuce Grown in an Indoor Environment Using Deep Learning Algorithms.Sensors (Basel). 2022 Sep 24;22(19):7251. doi: 10.3390/s22197251. Sensors (Basel). 2022. PMID: 36236351 Free PMC article.
-
Resource use efficiency of indoor lettuce (Lactuca sativa L.) cultivation as affected by red:blue ratio provided by LED lighting.Sci Rep. 2019 Oct 1;9(1):14127. doi: 10.1038/s41598-019-50783-z. Sci Rep. 2019. PMID: 31576006 Free PMC article.
-
Light-emitting diodes as an illumination source for plants: a review of research at Kennedy Space Center.Habitation (Elmsford). 2005;10(2):71-8. doi: 10.3727/154296605774791232. Habitation (Elmsford). 2005. PMID: 15751143 Review.
-
A comprehensive review of methods based on deep learning for diabetes-related foot ulcers.Front Endocrinol (Lausanne). 2022 Aug 8;13:945020. doi: 10.3389/fendo.2022.945020. eCollection 2022. Front Endocrinol (Lausanne). 2022. PMID: 36004341 Free PMC article. Review.
Cited by
-
Sooty Mold Detection on Citrus Tree Canopy Using Deep Learning Algorithms.Sensors (Basel). 2023 Oct 17;23(20):8519. doi: 10.3390/s23208519. Sensors (Basel). 2023. PMID: 37896610 Free PMC article.
-
Coffee Leaf Rust Disease Detection and Implementation of an Edge Device for Pruning Infected Leaves via Deep Learning Algorithms.Sensors (Basel). 2024 Dec 16;24(24):8018. doi: 10.3390/s24248018. Sensors (Basel). 2024. PMID: 39771754 Free PMC article.
References
-
- Kozai T., Niu G., Takagaki M. Plant Factory: An Indoor Vertical Farming System for Efficient Quality Food Production. Academic Press; Amsterdam, The Netherlands: 2019.
-
- Ahmed H.A., Yu-Xin T., Qi-Chang Y. Optimal control of environmental conditions affecting lettuce plant growth in a controlled environment with artificial lighting: A review. S. Afr. J. Bot. 2019;130:75–89. doi: 10.1016/j.sajb.2019.12.018. - DOI
-
- Kozai T., Kubota C., Chun C., Afreen F., Ohyama K. Transplant Production in the 21st Century. Springer; Dordrecht, The Netherlands: 2000. Necessity and Concept of the Closed Transplant Production System; pp. 3–19. - DOI
-
- Li Z., Li Y., Yang Y., Guo R., Yang J., Yue J., Wang Y. A high-precision detection method of hydroponic lettuce seedlings status based on improved Faster RCNN. Comput. Electron. Agric. 2021;182:106054. doi: 10.1016/j.compag.2021.106054. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
