

Design and Validation of a Low-Cost Mobile EEG-Based Brain-Computer Interface
- PMID: 37447780
- PMCID: PMC10346228
- DOI: 10.3390/s23135930
Design and Validation of a Low-Cost Mobile EEG-Based Brain-Computer Interface
Abstract
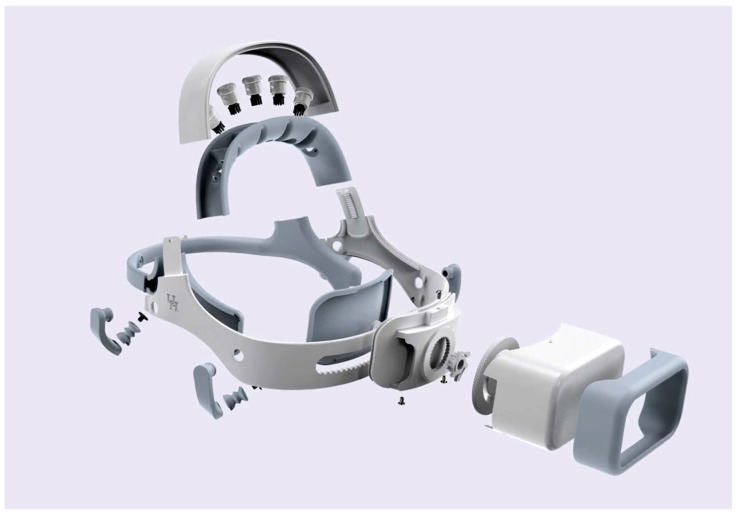
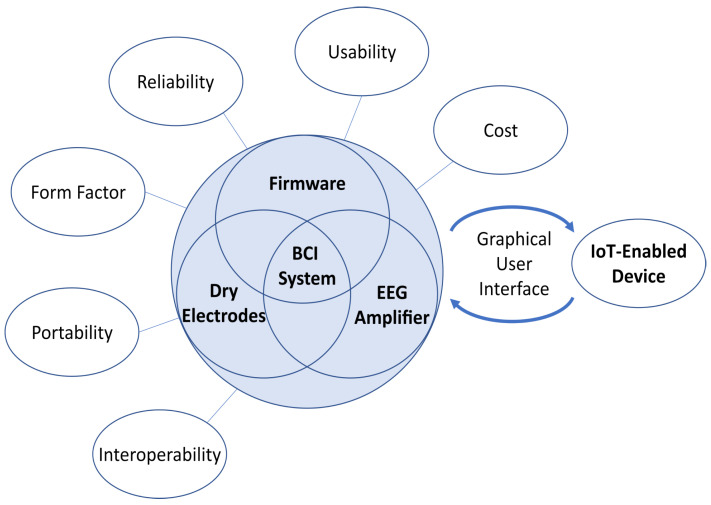
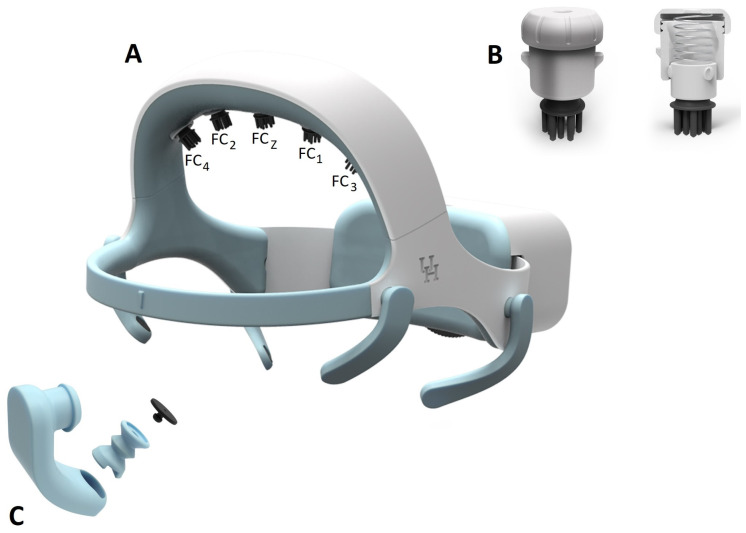
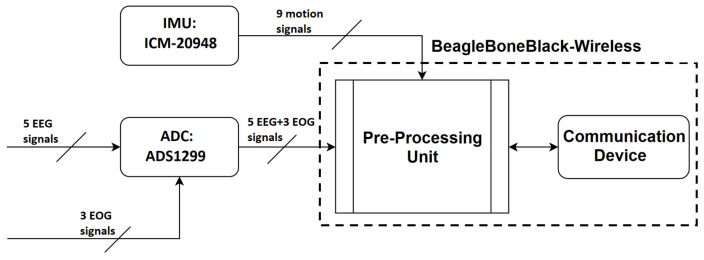
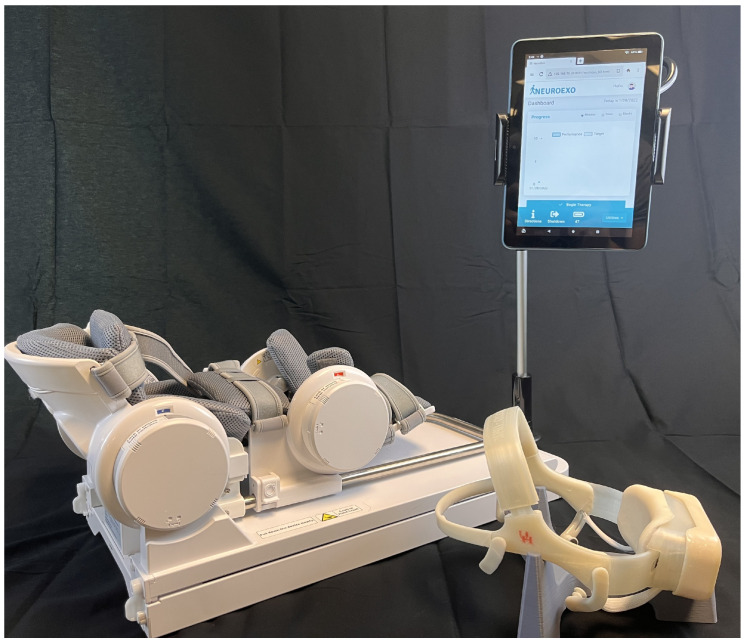
Objective: We designed and validated a wireless, low-cost, easy-to-use, mobile, dry-electrode headset for scalp electroencephalography (EEG) recordings for closed-loop brain-computer (BCI) interface and internet-of-things (IoT) applications. Approach: The EEG-based BCI headset was designed from commercial off-the-shelf (COTS) components using a multi-pronged approach that balanced interoperability, cost, portability, usability, form factor, reliability, and closed-loop operation. Main Results: The adjustable headset was designed to accommodate 90% of the population. A patent-pending self-positioning dry electrode bracket allowed for vertical self-positioning while parting the user's hair to ensure contact of the electrode with the scalp. In the current prototype, five EEG electrodes were incorporated in the electrode bracket spanning the sensorimotor cortices bilaterally, and three skin sensors were included to measure eye movement and blinks. An inertial measurement unit (IMU) provides monitoring of head movements. The EEG amplifier operates with 24-bit resolution up to 500 Hz sampling frequency and can communicate with other devices using 802.11 b/g/n WiFi. It has high signal-to-noise ratio (SNR) and common-mode rejection ratio (CMRR) (121 dB and 110 dB, respectively) and low input noise. In closed-loop BCI mode, the system can operate at 40 Hz, including real-time adaptive noise cancellation and 512 MB of processor memory. It supports LabVIEW as a backend coding language and JavaScript (JS), Cascading Style Sheets (CSS), and HyperText Markup Language (HTML) as front-end coding languages and includes training and optimization of support vector machine (SVM) neural classifiers. Extensive bench testing supports the technical specifications and human-subject pilot testing of a closed-loop BCI application to support upper-limb rehabilitation and provides proof-of-concept validation for the device's use at both the clinic and at home. Significance: The usability, interoperability, portability, reliability, and programmability of the proposed wireless closed-loop BCI system provides a low-cost solution for BCI and neurorehabilitation research and IoT applications.
Keywords: brain–computer interfaces; electroencephalography; mobile EEG; motor intent detection; neurodiagnostics; rehabilitation.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Similar articles
-
Gait adaptation to visual kinematic perturbations using a real-time closed-loop brain-computer interface to a virtual reality avatar.J Neural Eng. 2016 Jun;13(3):036006. doi: 10.1088/1741-2560/13/3/036006. Epub 2016 Apr 11. J Neural Eng. 2016. PMID: 27064824 Free PMC article.
-
Recording human electrocorticographic (ECoG) signals for neuroscientific research and real-time functional cortical mapping.J Vis Exp. 2012 Jun 26;(64):3993. doi: 10.3791/3993. J Vis Exp. 2012. PMID: 22782131 Free PMC article.
-
Design of the multi-channel electroencephalography-based brain-computer interface with novel dry sensors.Annu Int Conf IEEE Eng Med Biol Soc. 2012;2012:1793-7. doi: 10.1109/EMBC.2012.6346298. Annu Int Conf IEEE Eng Med Biol Soc. 2012. PMID: 23366259
-
A comprehensive review of EEG-based brain-computer interface paradigms.J Neural Eng. 2019 Feb;16(1):011001. doi: 10.1088/1741-2552/aaf12e. Epub 2018 Nov 15. J Neural Eng. 2019. PMID: 30523919 Review.
-
EEG-Based BCI Control Schemes for Lower-Limb Assistive-Robots.Front Hum Neurosci. 2018 Aug 6;12:312. doi: 10.3389/fnhum.2018.00312. eCollection 2018. Front Hum Neurosci. 2018. PMID: 30127730 Free PMC article. Review.
Cited by
-
Negative emotion modulates postural tremor variability in Parkinson's disease: A multimodal EEG and motion sensor study toward behavioral interventions.IBRO Neurosci Rep. 2025 Apr 11;18:663-671. doi: 10.1016/j.ibneur.2025.04.003. eCollection 2025 Jun. IBRO Neurosci Rep. 2025. PMID: 40330950 Free PMC article.
-
Brain-Computer Interfaces for Upper Limb Motor Recovery after Stroke: Current Status and Development Prospects (Review).Sovrem Tekhnologii Med. 2023;15(6):63-73. doi: 10.17691/stm2023.15.6.07. Epub 2023 Dec 27. Sovrem Tekhnologii Med. 2023. PMID: 39944367 Free PMC article. Review.
-
User Evaluation of a Shared Robot Control System Combining BCI and Eye Tracking in a Portable Augmented Reality User Interface.Sensors (Basel). 2024 Aug 14;24(16):5253. doi: 10.3390/s24165253. Sensors (Basel). 2024. PMID: 39204948 Free PMC article.
-
At-Home Stroke Neurorehabilitation: Early Findings with the NeuroExo BCI System.Sensors (Basel). 2025 Feb 21;25(5):1322. doi: 10.3390/s25051322. Sensors (Basel). 2025. PMID: 40096116 Free PMC article.
References
-
- Kübler A. The history of BCI: From a vision for the future to real support for personhood in people with locked-in syndrome. Neuroethics. 2020;13:163–180. doi: 10.1007/s12152-019-09409-4. - DOI
-
- Nijholt A., Contreras-Vidal J., Jeunet C., Väljamäe A. Brain-Computer Interfaces for Non-clinical (Home, Sports, Art, Entertainment, Education, Well-Being) Applications. Front. Comput. Sci. 2022;4:860619. doi: 10.3389/fcomp.2022.860619. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
