

Validation of Estimators for Weight-Bearing and Shoulder Joint Loads Using Instrumented Crutches
- PMID: 37448059
- PMCID: PMC10347278
- DOI: 10.3390/s23136213
Validation of Estimators for Weight-Bearing and Shoulder Joint Loads Using Instrumented Crutches
Abstract
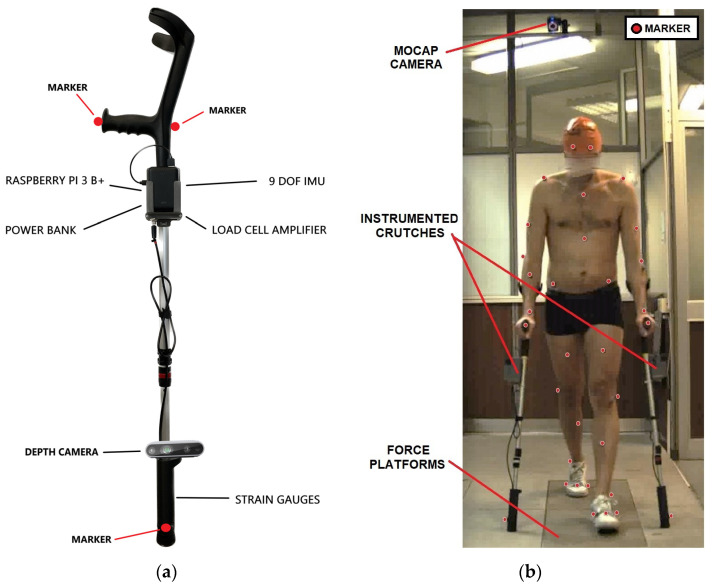
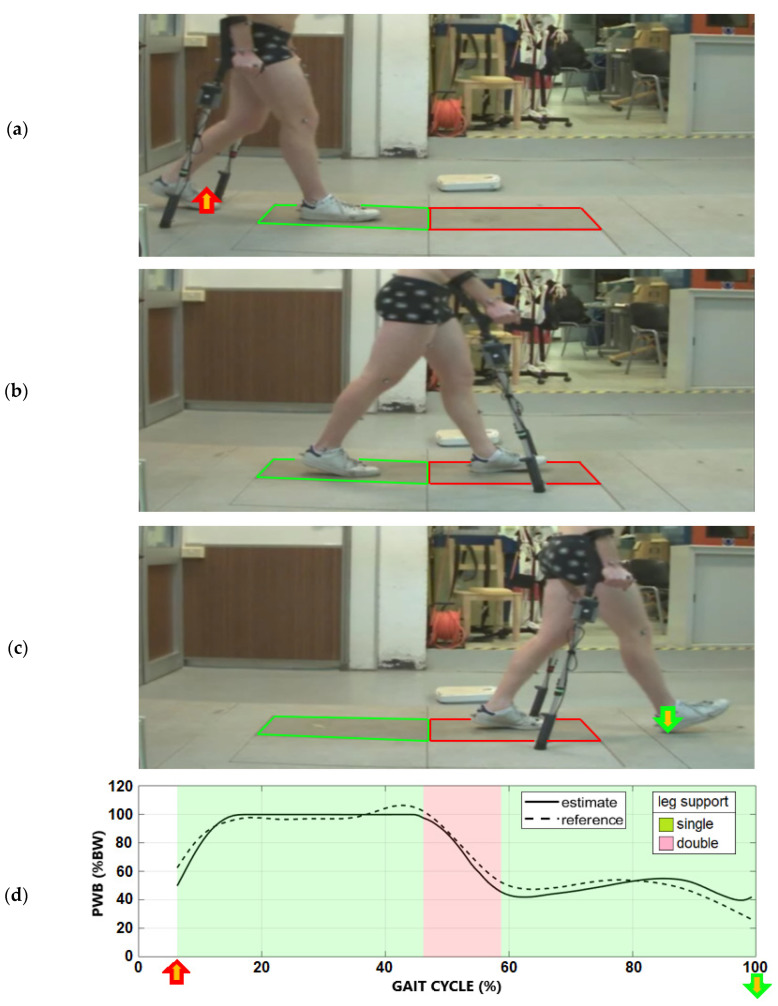
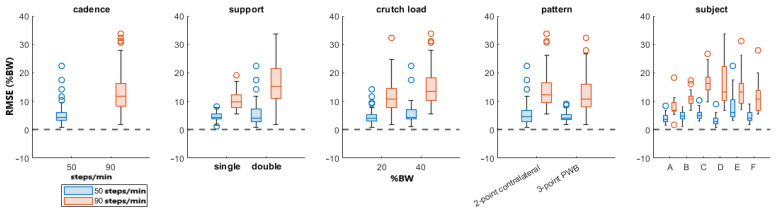
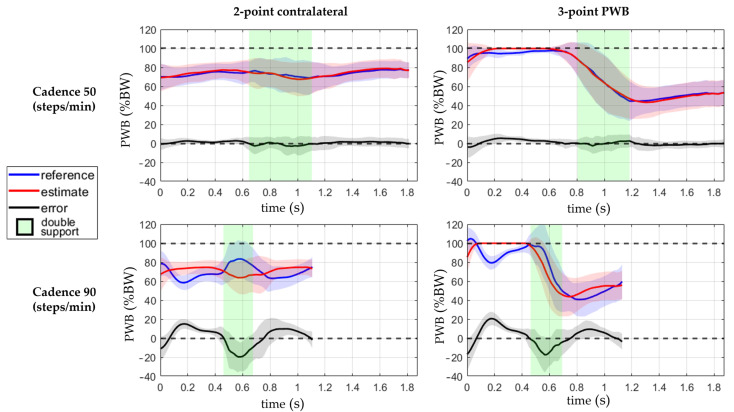
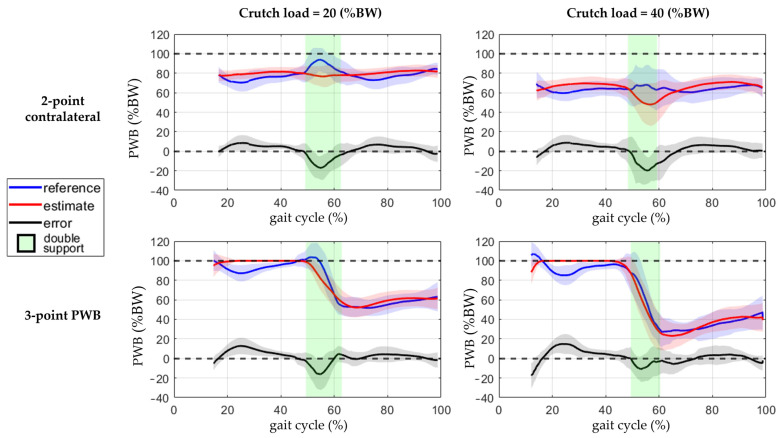
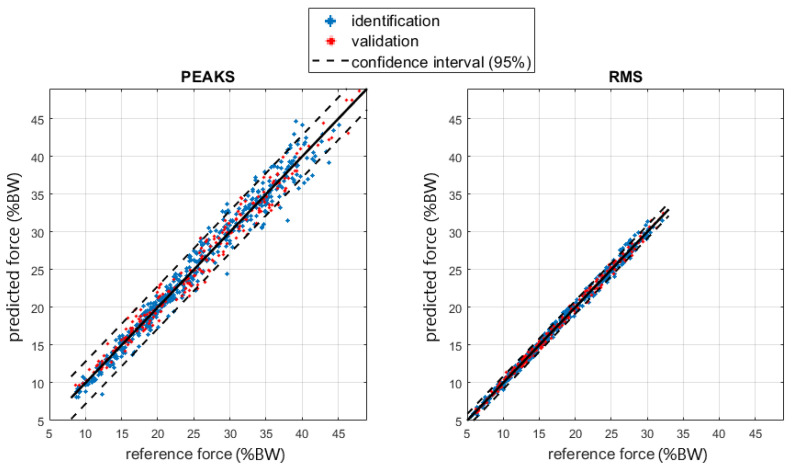
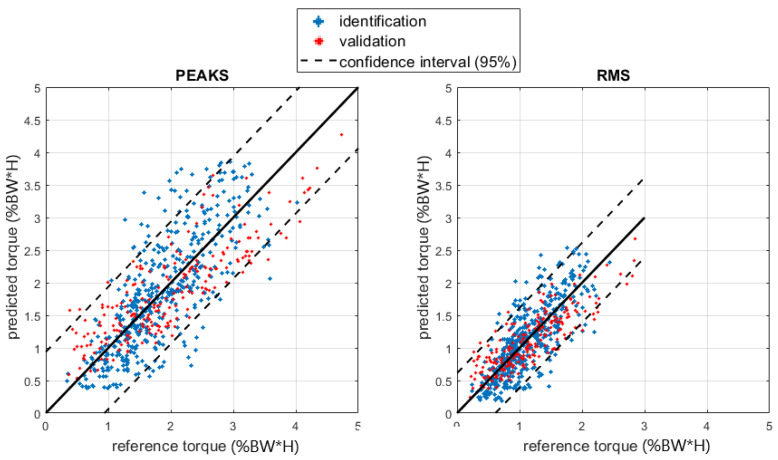
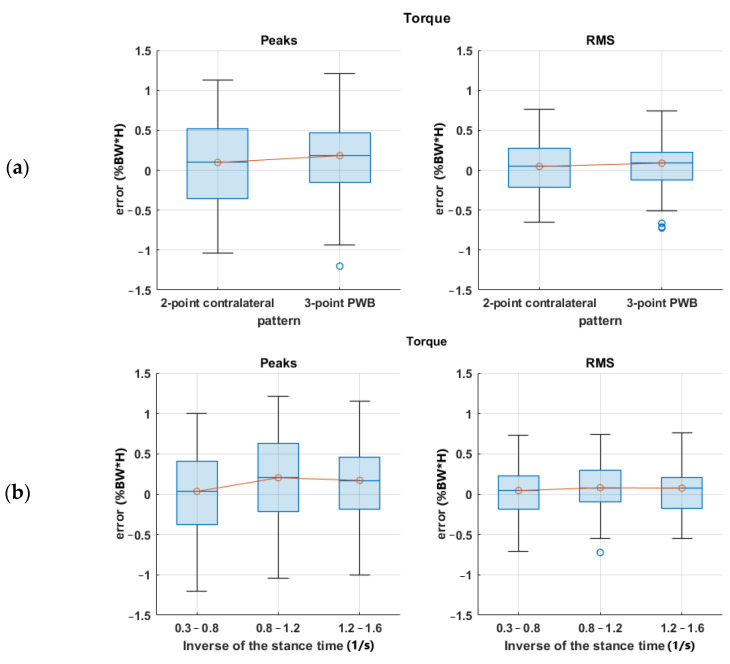
This research paper aimed to validate two methods for measuring loads during walking with instrumented crutches: one method to estimate partial weight-bearing on the lower limbs and another to estimate shoulder joint reactions. Currently, gait laboratories, instrumented with high-end measurement systems, are used to extract kinematic and kinetic data, but such facilities are expensive and not accessible to all patients. The proposed method uses instrumented crutches to measure ground reaction forces and does not require any motion capture devices or force platforms. The load on the lower limbs is estimated by subtracting the forces measured by the crutches from the subject's total weight. Since the model does not consider inertia contribution in dynamic conditions, the estimation improves with low walking cadence when walking with the two-point contralateral and the three-point partial weight-bearing patterns considered for the validation tests. The shoulder joint reactions are estimated using linear regression, providing accurate values for the forces but less accurate torque estimates. The crutches data are acquired and processed in real-time, allowing for immediate feedback, and the system can be used outdoors in real-world walking conditions. The validation of this method could lead to better monitoring of partial weight-bearing and shoulder joint reactions, which could improve patient outcomes and reduce complications.
Keywords: biomechanical model; gait analysis; instrumented crutches; load measurement; partial weight-bearing; shoulder joint; shoulder load; walking aid.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




References
-
- Laufer Y. The use of walking aids in the rehabilitation of stroke patients. Rev. Clin. Gerontol. 2004;14:137–144. doi: 10.1017/S0959259805001449. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
