

Exploring the criticality hypothesis using programmable swarm robots with Vicsek-like interactions
- PMID: 37464802
- PMCID: PMC10354469
- DOI: 10.1098/rsif.2023.0176
Exploring the criticality hypothesis using programmable swarm robots with Vicsek-like interactions
Abstract
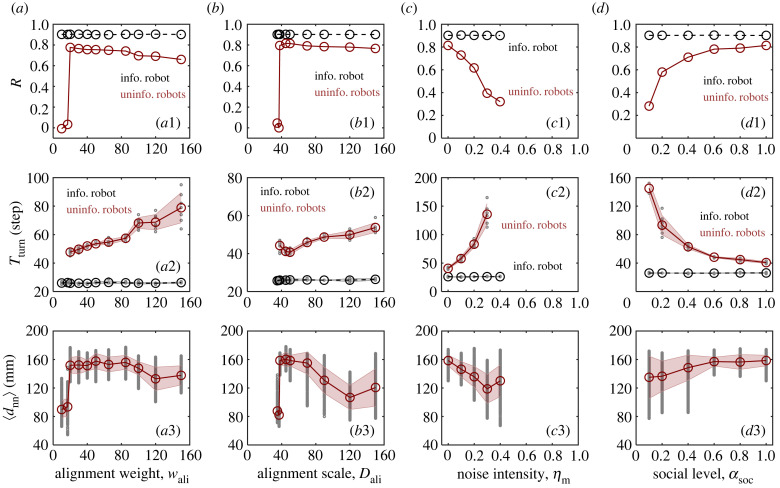
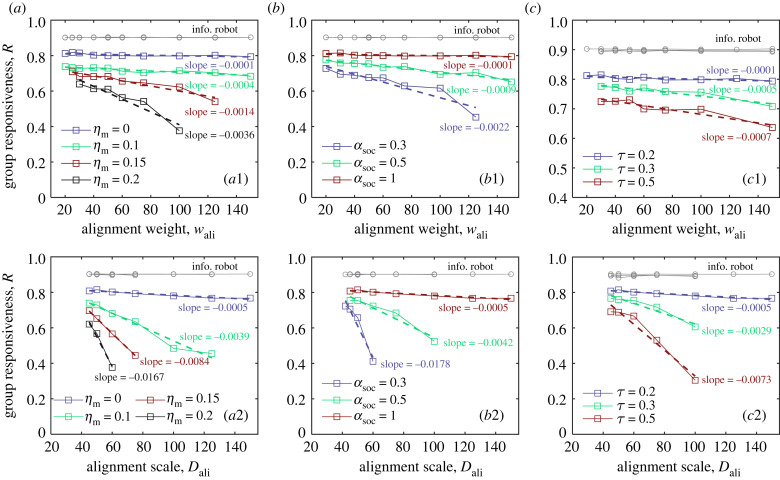
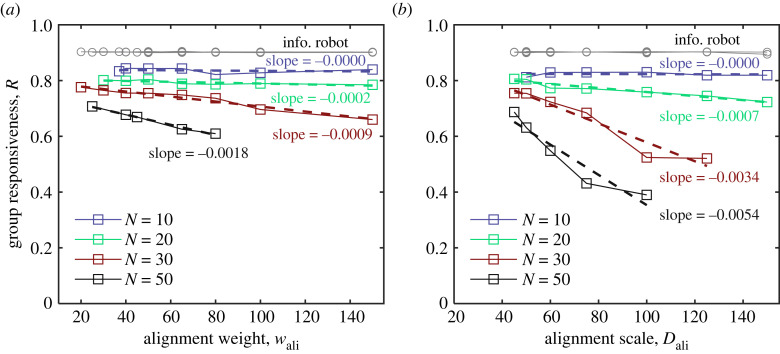
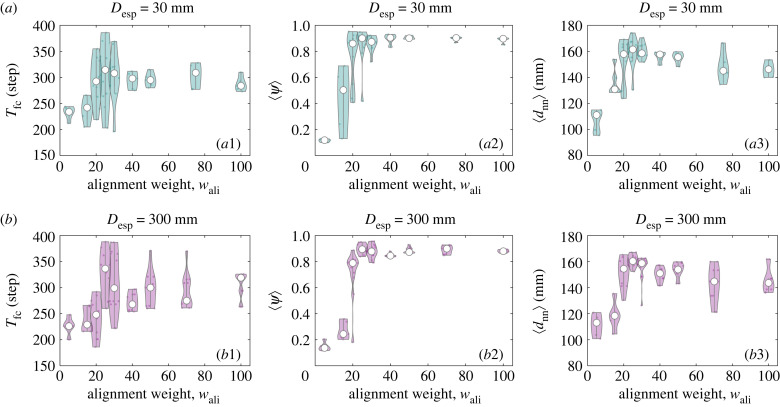
A widely mentioned but not experimentally confirmed view (known as the 'criticality hypothesis') argues that biological swarm systems gain optimal responsiveness to perturbations and information processing capabilities by operating near the critical state where an ordered-to-disordered state transition occurs. However, various factors can induce the ordered-disordered transition, and the explicit relationship between these factors and the criticality is still unclear. Here, we present an experimental validation for the criticality hypothesis by employing real programmable swarm-robotic systems (up to 50 robots) governed by Vicsek-like interactions, subject to time-varying stimulus-response and hazard avoidance. We find that (i) not all ordered-disordered motion transitions correspond to the functional advantages for groups; (ii) collective response of groups is maximized near the critical state induced by alignment weight or scale rather than noise and other non-alignment factors; and (iii) those non-alignment factors act to highlight the functional advantages of alignment-induced criticality. These results suggest that the adjustability of velocity or directional coupling between individuals plays an essential role in the acquisition of maximizing collective response by criticality. Our results contribute to understanding the adjustment strategies of animal interactions from a perspective of criticality and provide insights into the design and control of swarm robotics.
Keywords: alignment; collective response; criticality; ordered–disordered motion transition; self-organization; swarm robots.
Conflict of interest statement
We declare we have no competing interests.
Figures
Similar articles
-
Body orientation change of neighbors leads to scale-free correlation in collective motion.Nat Commun. 2024 Oct 17;15(1):8968. doi: 10.1038/s41467-024-53361-8. Nat Commun. 2024. PMID: 39420172 Free PMC article.
-
Criticality-Driven Evolution of Adaptable Morphologies of Voxel-Based Soft-Robots.Front Robot AI. 2021 Jun 17;8:673156. doi: 10.3389/frobt.2021.673156. eCollection 2021. Front Robot AI. 2021. PMID: 34222354 Free PMC article.
-
Evolution of Collective Behaviors for a Real Swarm of Aquatic Surface Robots.PLoS One. 2016 Mar 21;11(3):e0151834. doi: 10.1371/journal.pone.0151834. eCollection 2016. PLoS One. 2016. PMID: 26999614 Free PMC article.
-
Field-Driven Out-of-Equilibrium Collective Patterns for Swarm Micro-Robotics.ACS Nano. 2025 May 6;19(17):16248-16266. doi: 10.1021/acsnano.5c01238. Epub 2025 Apr 28. ACS Nano. 2025. PMID: 40292636 Review.
-
Swarm Robotics: A Perspective on the Latest Reviewed Concepts and Applications.Sensors (Basel). 2021 Mar 15;21(6):2062. doi: 10.3390/s21062062. Sensors (Basel). 2021. PMID: 33804187 Free PMC article. Review.
Cited by
-
Body orientation change of neighbors leads to scale-free correlation in collective motion.Nat Commun. 2024 Oct 17;15(1):8968. doi: 10.1038/s41467-024-53361-8. Nat Commun. 2024. PMID: 39420172 Free PMC article.
-
Perception of motion salience shapes the emergence of collective motions.Nat Commun. 2024 Jun 5;15(1):4779. doi: 10.1038/s41467-024-49151-x. Nat Commun. 2024. PMID: 38839782 Free PMC article.
References
-
- Roli A, Villani M, Filisetti A, Serra R. 2018. Dynamical criticality: overview and open questions. J. Syst. Sci. Complex. 31, 647-663. (10.1007/s11424-017-6117-5) - DOI
-
- Mora T, Bialek W. 2011. Are biological systems poised at criticality? J. Stat. Phys. 144, 268-302. (10.1007/s10955-011-0229-4) - DOI
-
- Munoz MA. 2018. Colloquium: criticality and dynamical scaling in living systems. Rev. Mod. Phys. 90, 031001. (10.1103/RevModPhys.90.031001) - DOI
Publication types
MeSH terms
Associated data
LinkOut - more resources
Full Text Sources
