

Fluctuotaxis: Nanoscale directional motion away from regions of fluctuation
- PMID: 37487105
- PMCID: PMC10401016
- DOI: 10.1073/pnas.2220500120
Fluctuotaxis: Nanoscale directional motion away from regions of fluctuation
Abstract
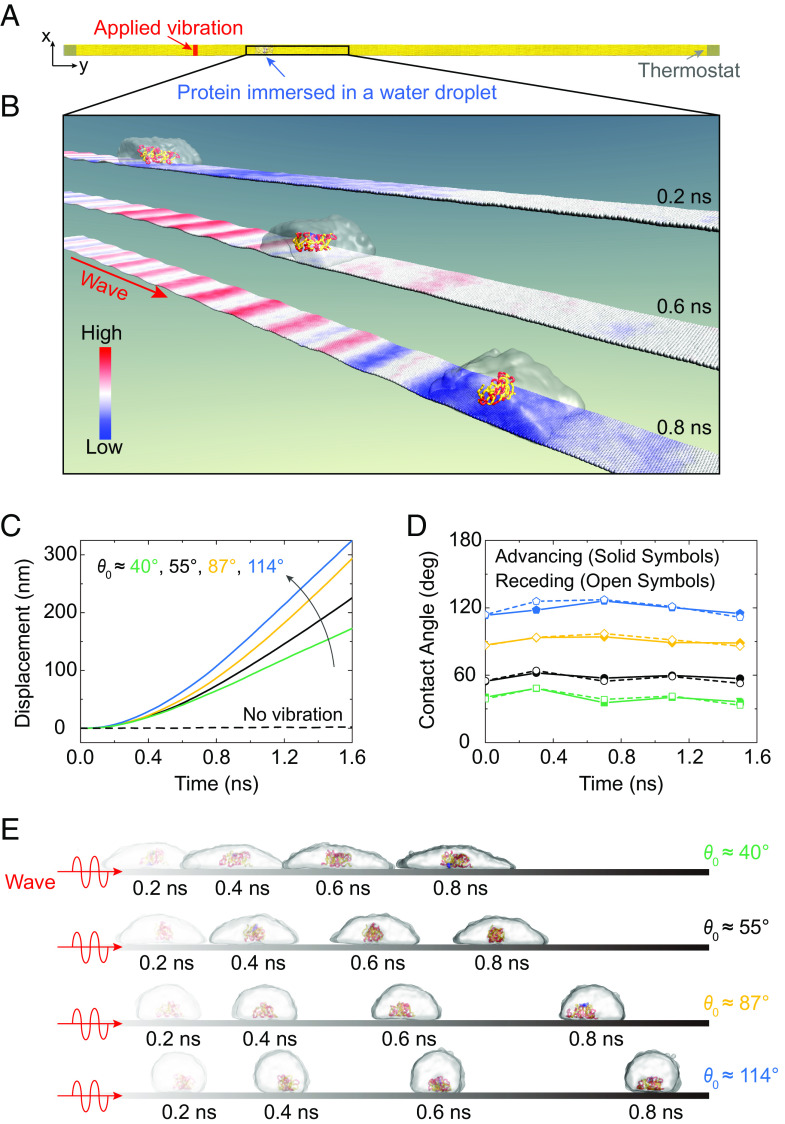
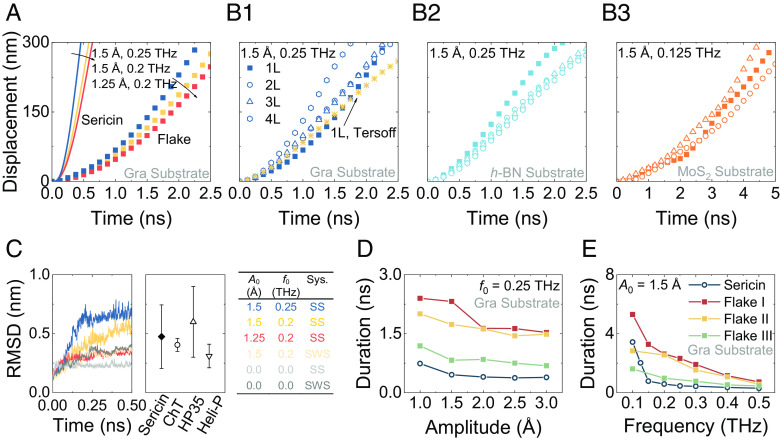
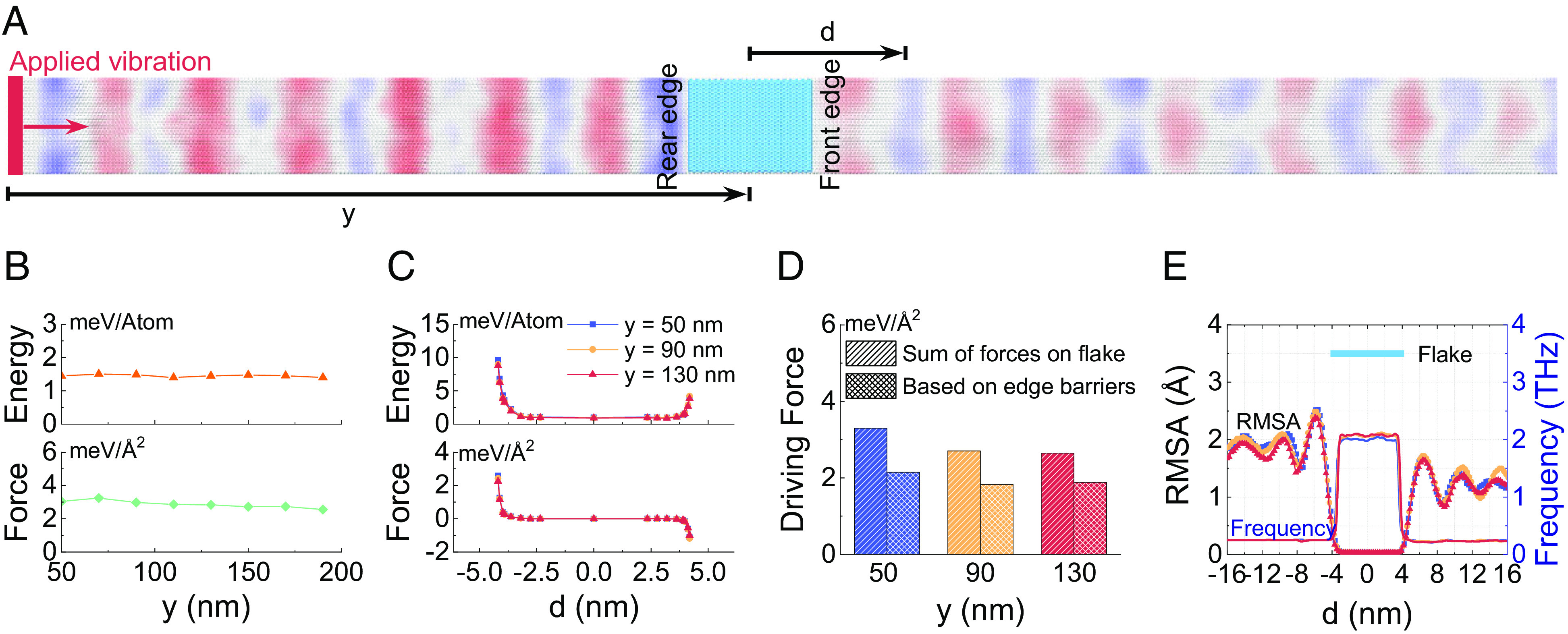
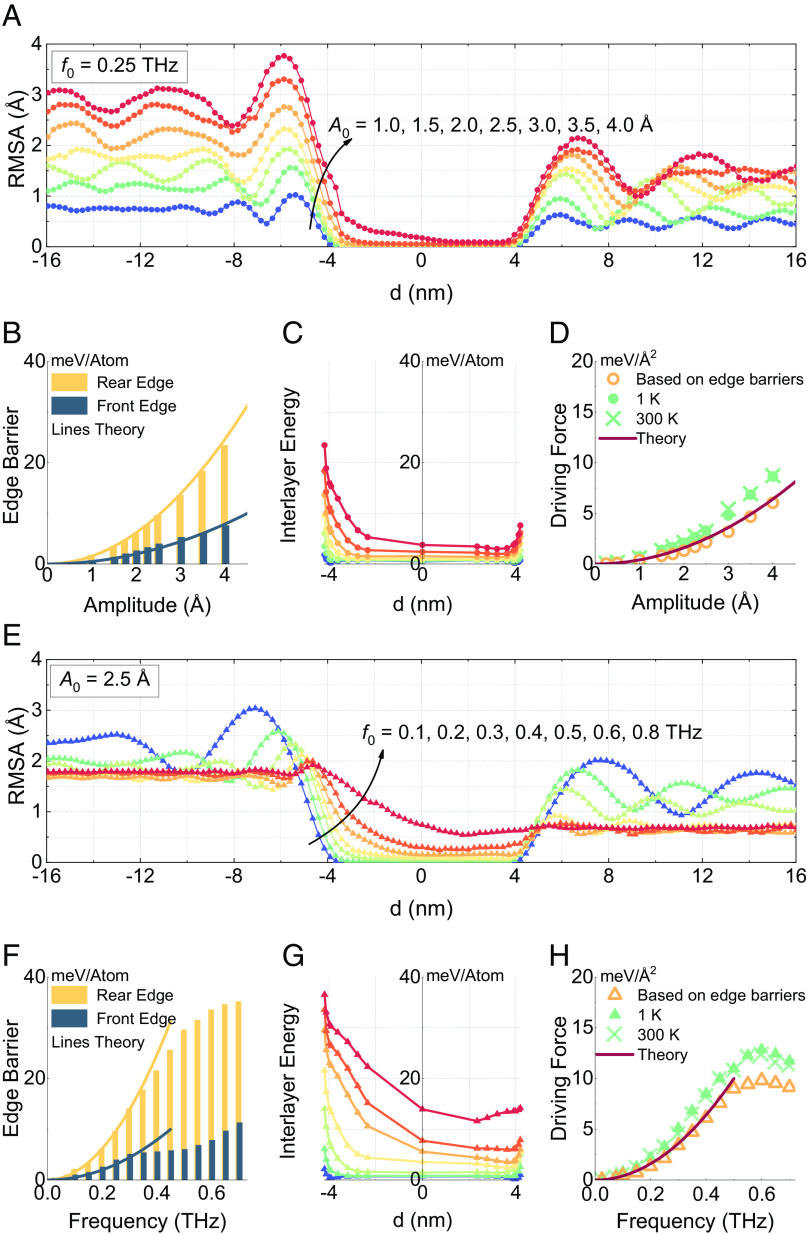
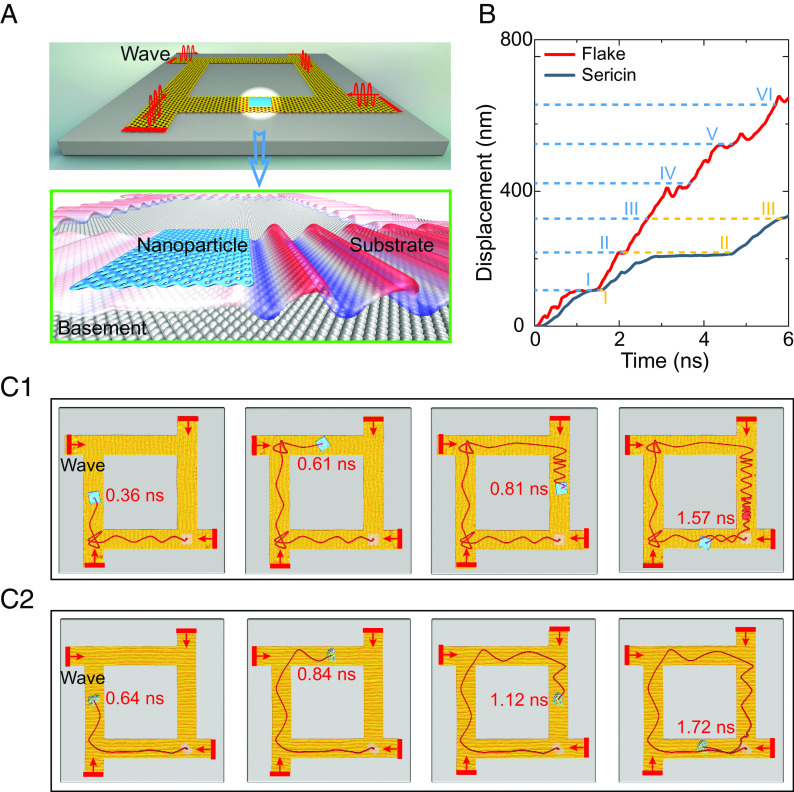
Regulating the motion of nanoscale objects on a solid surface is vital for a broad range of technologies such as nanotechnology, biotechnology, and mechanotechnology. In spite of impressive advances achieved in the field, there is still a lack of a robust mechanism which can operate under a wide range of situations and in a controllable manner. Here, we report a mechanism capable of controllably driving directed motion of any nanoobjects (e.g., nanoparticles, biomolecules, etc.) in both solid and liquid forms. We show via molecular dynamics simulations that a nanoobject would move preferentially away from the fluctuating region of an underlying substrate, a phenomenon termed fluctuotaxis-for which the driving force originates from the difference in atomic fluctuations of the substrate behind and ahead of the object. In particular, we find that the driving force can depend quadratically on both the amplitude and frequency of the substrate and can thus be tuned flexibly. The proposed driving mechanism provides a robust and controllable way for nanoscale mass delivery and has potential in various applications including nanomotors, molecular machines, etc.
Keywords: atomic fluctuation; mechanical vibration; molecular dynamics; regulating motion; robust driving mechanism.
Conflict of interest statement
The authors declare no competing interest.
Figures
Similar articles
-
Nanoscale directional motion towards regions of stiffness.Phys Rev Lett. 2015 Jan 9;114(1):015504. doi: 10.1103/PhysRevLett.114.015504. Epub 2015 Jan 7. Phys Rev Lett. 2015. PMID: 25615480
-
Opto-Thermocapillary Nanomotors on Solid Substrates.ACS Nano. 2022 Jun 28;16(6):8820-8826. doi: 10.1021/acsnano.1c09800. Epub 2022 May 20. ACS Nano. 2022. PMID: 35594375 Free PMC article.
-
Nanoscale directional motion by angustotaxis.Nanoscale. 2020 Mar 7;12(9):5308-5312. doi: 10.1039/c9nr10108j. Epub 2019 Dec 24. Nanoscale. 2020. PMID: 31872851
-
Active therapy based on the byproducts of micro/nanomotors.Nanoscale. 2023 Jan 19;15(3):953-962. doi: 10.1039/d2nr05818a. Nanoscale. 2023. PMID: 36537366 Review.
-
Manganese-Based Micro/Nanomotors: Synthesis, Motion, and Applications.Small. 2021 Dec;17(50):e2100927. doi: 10.1002/smll.202100927. Epub 2021 Jul 28. Small. 2021. PMID: 34318613 Review.
Cited by
-
Self-propelled directed transport of C60 fullerene on the surface of the cone-shaped carbon nanotubes.Sci Rep. 2024 Sep 16;14(1):21630. doi: 10.1038/s41598-024-72873-3. Sci Rep. 2024. PMID: 39284904 Free PMC article.
-
Acquisition of molecular rolling lubrication by self-curling of graphite nanosheet at cryogenic temperature.Nat Commun. 2024 Jul 9;15(1):5747. doi: 10.1038/s41467-024-49994-4. Nat Commun. 2024. PMID: 38982069 Free PMC article.
References
-
- Kudernac T., et al. , Electrically driven directional motion of a four-wheeled molecule on a metal surface. Nature 479, 208–211 (2011). - PubMed
-
- Barnard A. S., Nanoscale locomotion without fuel. Nature 519, 37–38 (2015). - PubMed
-
- Sitt A., Hess H., Directed transport by surface chemical potential gradients for enhancing analyte collection in nanoscale sensors. Nano Lett. 15, 3341–3350 (2015). - PubMed
-
- Fischer T., Agarwal A., Hess H., A smart dust biosensor powered by kinesin motors. Nat. Nanotechnol. 4, 162–166 (2009). - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
