

This is a preprint.
Perceptual Transitions between Object Rigidity & Non-rigidity: Competition and cooperation between motion-energy, feature-tracking and shape-based priors
- PMID: 37503257
- PMCID: PMC10369874
- DOI: 10.1101/2023.04.07.536067
Perceptual Transitions between Object Rigidity & Non-rigidity: Competition and cooperation between motion-energy, feature-tracking and shape-based priors
Update in
-
Perceptual transitions between object rigidity and non-rigidity: Competition and cooperation among motion energy, feature tracking, and shape-based priors.J Vis. 2024 Feb 1;24(2):3. doi: 10.1167/jov.24.2.3. J Vis. 2024. PMID: 38306112 Free PMC article.
Abstract
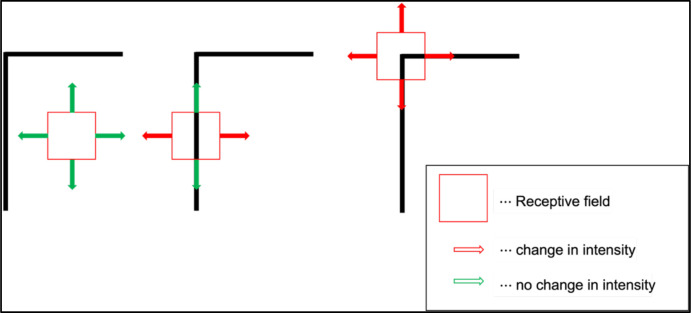
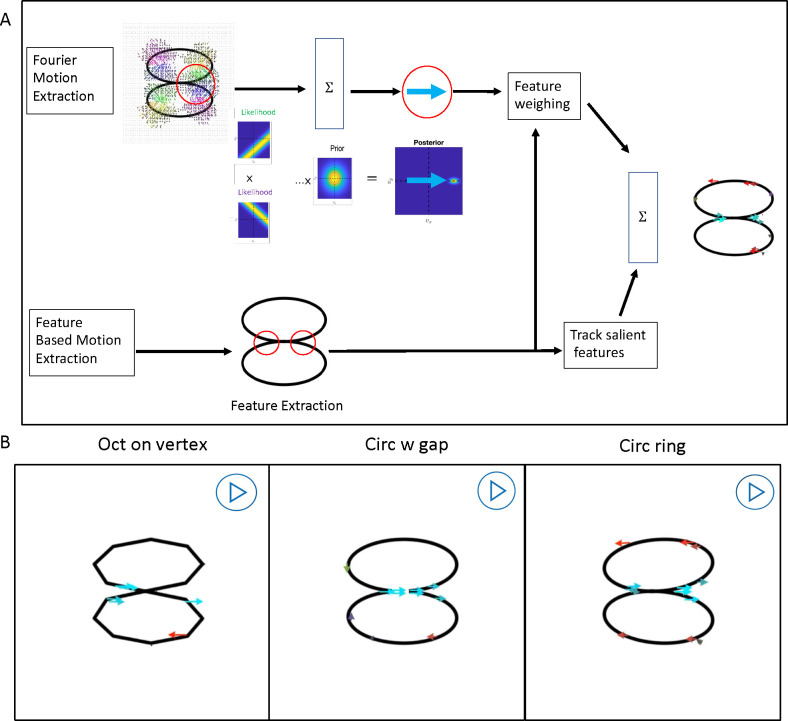
Why do moving objects appear rigid when projected retinal images are deformed non-rigidly? We used rotating rigid objects that can appear rigid or non-rigid to test whether shape features contribute to rigidity perception. When two circular rings were rigidly linked at an angle and jointly rotated at moderate speeds, observers reported that the rings wobbled and were not linked rigidly but rigid rotation was reported at slow speeds. When gaps, paint or vertices were added, the rings appeared rigidly rotating even at moderate speeds. At high speeds, all configurations appeared non-rigid. Salient features thus contribute to rigidity at slow and moderate speeds, but not at high speeds. Simulated responses of arrays of motion-energy cells showed that motion flow vectors are predominantly orthogonal to the contours of the rings, not parallel to the rotation direction. A convolutional neural network trained to distinguish flow patterns for wobbling versus rotation, gave a high probability of wobbling for the motion-energy flows. However, the CNN gave high probabilities of rotation for motion flows generated by tracking features with arrays of MT pattern-motion cells and corner detectors. In addition, circular rings can appear to spin and roll despite the absence of any sensory evidence, and this illusion is prevented by vertices, gaps, and painted segments, showing the effects of rotational symmetry and shape. Combining CNN outputs that give greater weight to motion energy at fast speeds and to feature tracking at slow, with the shape-based priors for wobbling and rolling, explained rigid and nonrigid percepts across shapes and speeds (R2=0.95). The results demonstrate how cooperation and competition between different neuronal classes leads to specific states of visual perception and to transitions between the states.
Conflict of interest statement
The authors declare no competing interests.
Figures










References
-
- Abadi M., Agarwal A., Barham P., Brevdo E., Chen Z., Citro C., … & Zheng X. (2016). Tensorflow: Large-scale machine learning on heterogeneous distributed systems. arXiv preprint arXiv:1603.04467.
-
- Adelson E. H., & Bergen J. R. (1985). Spatiotemporal energy models for the perception of motion. Journal of the Optical Society of America A, 2(2), 284–299. - PubMed
-
- Adelson E. H., & Movshon J. A. (1982). Phenomenal coherence of moving visual patterns. Nature, 300(5892), 523–525. - PubMed
-
- Aggarwal J. K., Cai Q., Liao W., & Sabata B. (1998). Nonrigid motion analysis: Articulated and elastic motion. Computer Vision and Image Understanding, 70(2), 142 156.
-
- Akhter I., Sheikh Y., Khan S., & Kanade T. (2010). Trajectory space: A dual representation for nonrigid structure from motion. IEEE Transactions on Pattern Analysis and Machine Intelligence, 33(7), 1442–1456. - PubMed
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources