

A Methodology to Model the Rain and Fog Effect on the Performance of Automotive LiDAR Sensors
- PMID: 37571674
- PMCID: PMC10422612
- DOI: 10.3390/s23156891
A Methodology to Model the Rain and Fog Effect on the Performance of Automotive LiDAR Sensors
Abstract
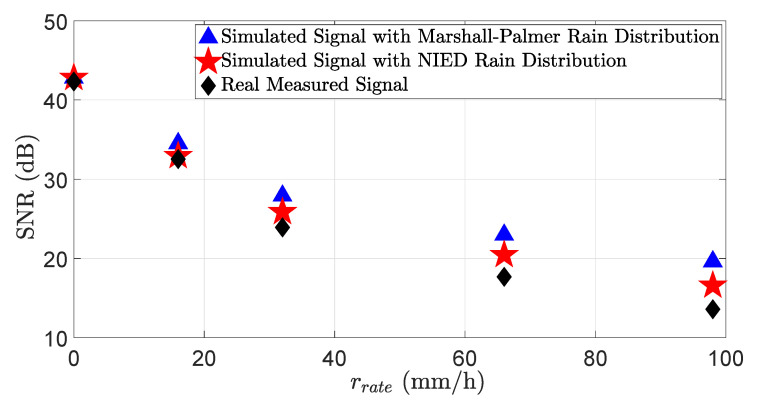
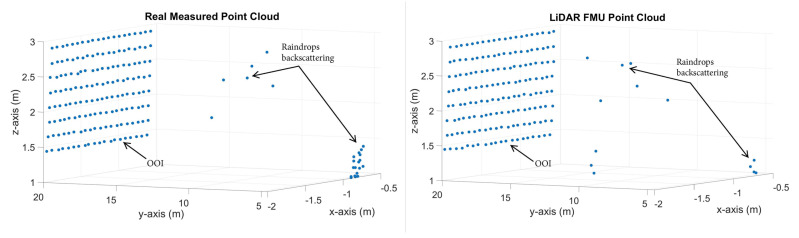
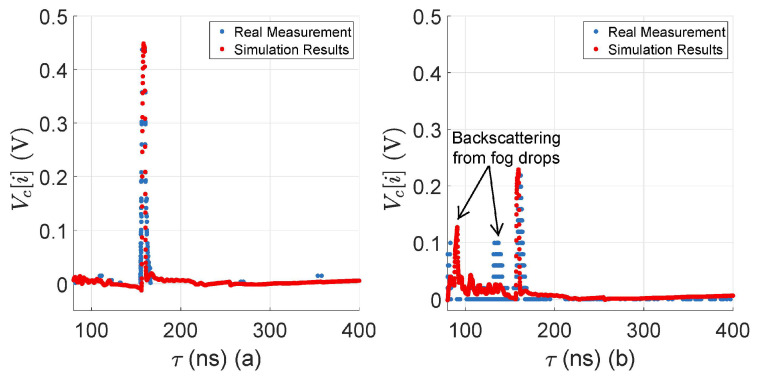
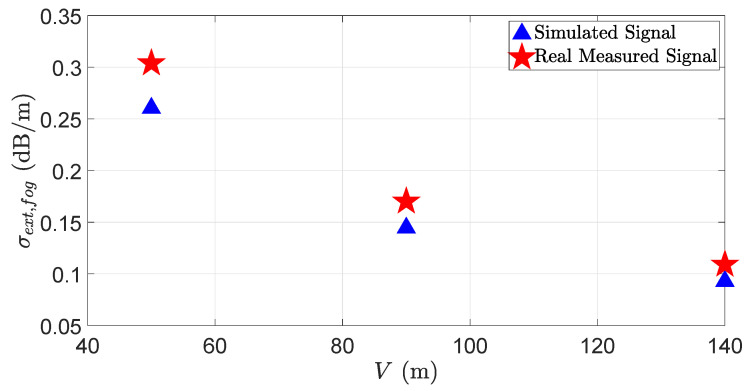
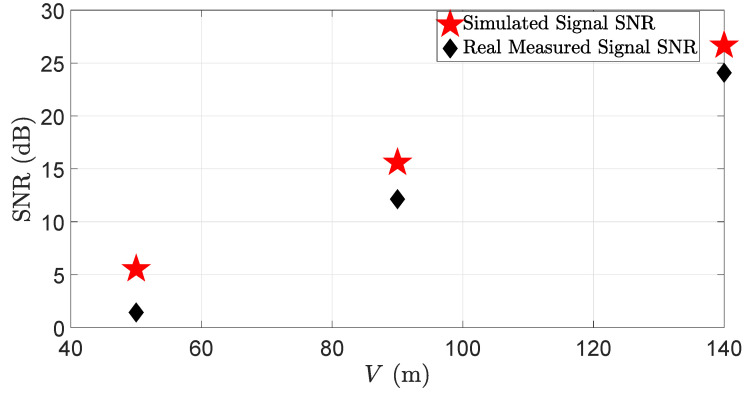
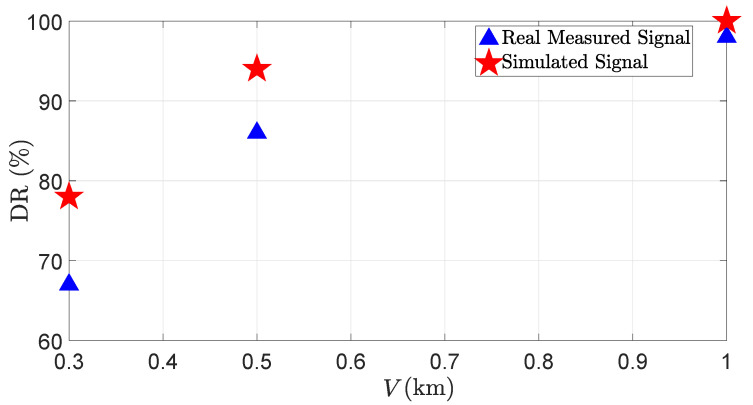
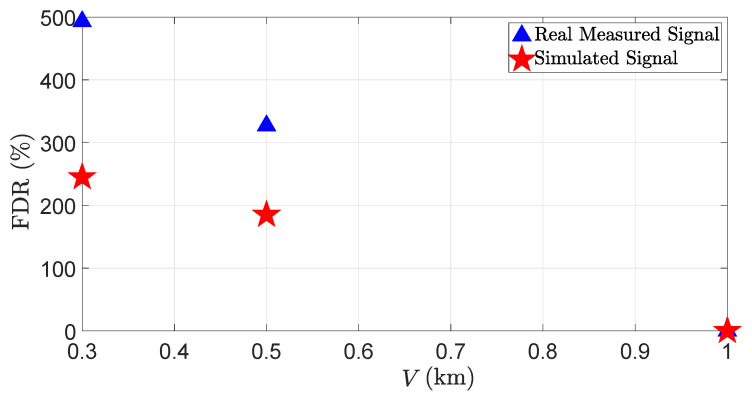
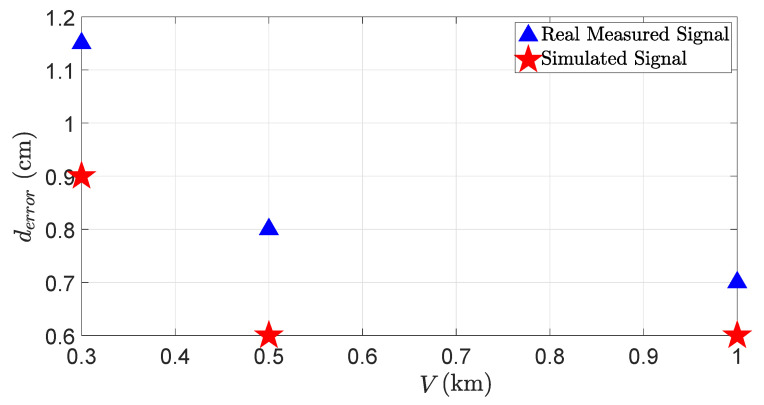
In this work, we introduce a novel approach to model the rain and fog effect on the light detection and ranging (LiDAR) sensor performance for the simulation-based testing of LiDAR systems. The proposed methodology allows for the simulation of the rain and fog effect using the rigorous applications of the Mie scattering theory on the time domain for transient and point cloud levels for spatial analyses. The time domain analysis permits us to benchmark the virtual LiDAR signal attenuation and signal-to-noise ratio (SNR) caused by rain and fog droplets. In addition, the detection rate (DR), false detection rate (FDR), and distance error derror of the virtual LiDAR sensor due to rain and fog droplets are evaluated on the point cloud level. The mean absolute percentage error (MAPE) is used to quantify the simulation and real measurement results on the time domain and point cloud levels for the rain and fog droplets. The results of the simulation and real measurements match well on the time domain and point cloud levels if the simulated and real rain distributions are the same. The real and virtual LiDAR sensor performance degrades more under the influence of fog droplets than in rain.
Keywords: LiDAR sensor; Mie theory; advanced driver-assistance system; backscattering; fog; functional mock-up interface; functional mock-up unit; open simulation interface; rain; sunlight.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Bilik I. Comparative Analysis of Radar and Lidar Technologies for Automotive Applications. IEEE Intell. Transp. Sys. Mag. 2022;15:244–269. doi: 10.1109/MITS.2022.3162886. - DOI
-
- Yole Intelligence, with the Strong Push of Chinese Players Eager to Integrate Innovative LiDAR Technologies, the Automotive Industry will Reach $2.0B in 2027, August 2022. [(accessed on 10 February 2023)]. Available online: https://www.yolegroup.com/product/report/lidar—market–technology-trends-...
-
- Kalra N., Paddock S.M. Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? Transp. Res. Part A Policy Pract. 2016;94:182–193. doi: 10.1016/j.tra.2016.09.010. - DOI
-
- NIED Center for Advanced Research Facility: Evaluating the Latest Science and Technology for Disaster Resilience, to Make Society’S Standards for Performance. [(accessed on 15 February 2023)]. Available online: https://www.bosai.go.jp/e/research/center/shisetsu.html.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
