

Performance of a Mobile 3D Camera to Evaluate Simulated Pathological Gait in Practical Scenarios
- PMID: 37571727
- PMCID: PMC10422615
- DOI: 10.3390/s23156944
Performance of a Mobile 3D Camera to Evaluate Simulated Pathological Gait in Practical Scenarios
Abstract
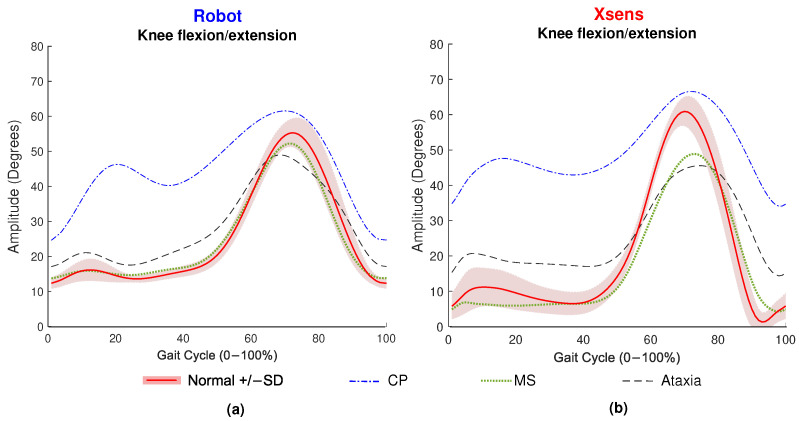
Three-dimensional (3D) cameras used for gait assessment obviate the need for bodily markers or sensors, making them particularly interesting for clinical applications. Due to their limited field of view, their application has predominantly focused on evaluating gait patterns within short walking distances. However, assessment of gait consistency requires testing over a longer walking distance. The aim of this study is to validate the accuracy for gait assessment of a previously developed method that determines walking spatiotemporal parameters and kinematics measured with a 3D camera mounted on a mobile robot base (ROBOGait). Walking parameters measured with this system were compared with measurements with Xsens IMUs. The experiments were performed on a non-linear corridor of approximately 50 m, resembling the environment of a conventional rehabilitation facility. Eleven individuals exhibiting normal motor function were recruited to walk and to simulate gait patterns representative of common neurological conditions: Cerebral Palsy, Multiple Sclerosis, and Cerebellar Ataxia. Generalized estimating equations were used to determine statistical differences between the measurement systems and between walking conditions. When comparing walking parameters between paired measures of the systems, significant differences were found for eight out of 18 descriptors: range of motion (ROM) of trunk and pelvis tilt, maximum knee flexion in loading response, knee position at toe-off, stride length, step time, cadence; and stance duration. When analyzing how ROBOGait can distinguish simulated pathological gait from physiological gait, a mean accuracy of 70.4%, a sensitivity of 49.3%, and a specificity of 74.4% were found when compared with the Xsens system. The most important gait abnormalities related to the clinical conditions were successfully detected by ROBOGait. The descriptors that best distinguished simulated pathological walking from normal walking in both systems were step width and stride length. This study underscores the promising potential of 3D cameras and encourages exploring their use in clinical gait analysis.
Keywords: 3D cameras; gait analysis; gait kinematics; inertial sensors; neurological disorders.
Conflict of interest statement
The authors declare no conflict of interest.
Figures


References
MeSH terms
LinkOut - more resources
Full Text Sources
