

Extensive investigation of geometric effects in sonoreactors: Analysis by luminol mapping and comparison with numerical predictions
- PMID: 37572427
- PMCID: PMC10448224
- DOI: 10.1016/j.ultsonch.2023.106542
Extensive investigation of geometric effects in sonoreactors: Analysis by luminol mapping and comparison with numerical predictions
Abstract
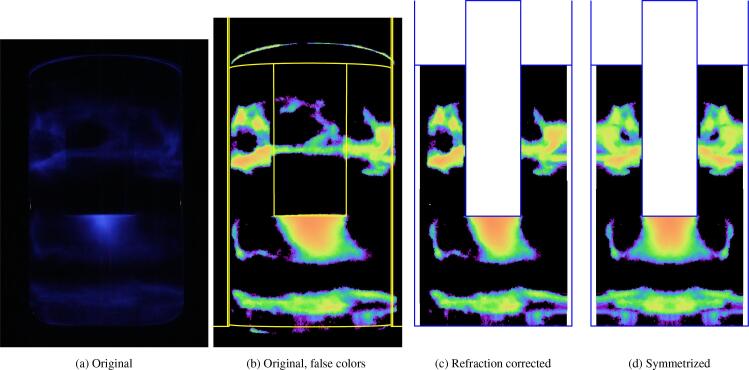
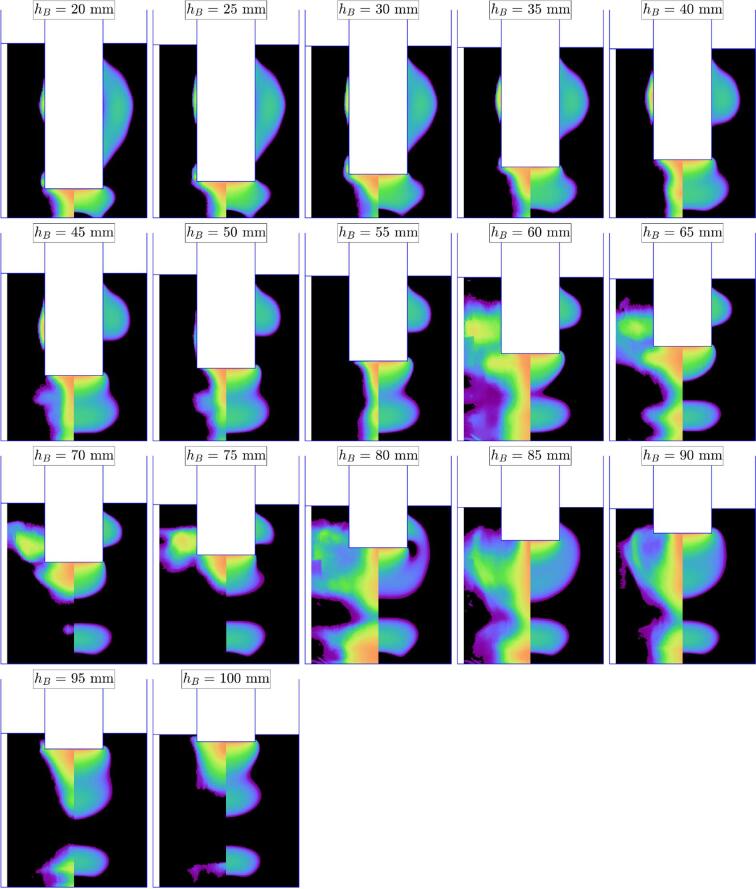
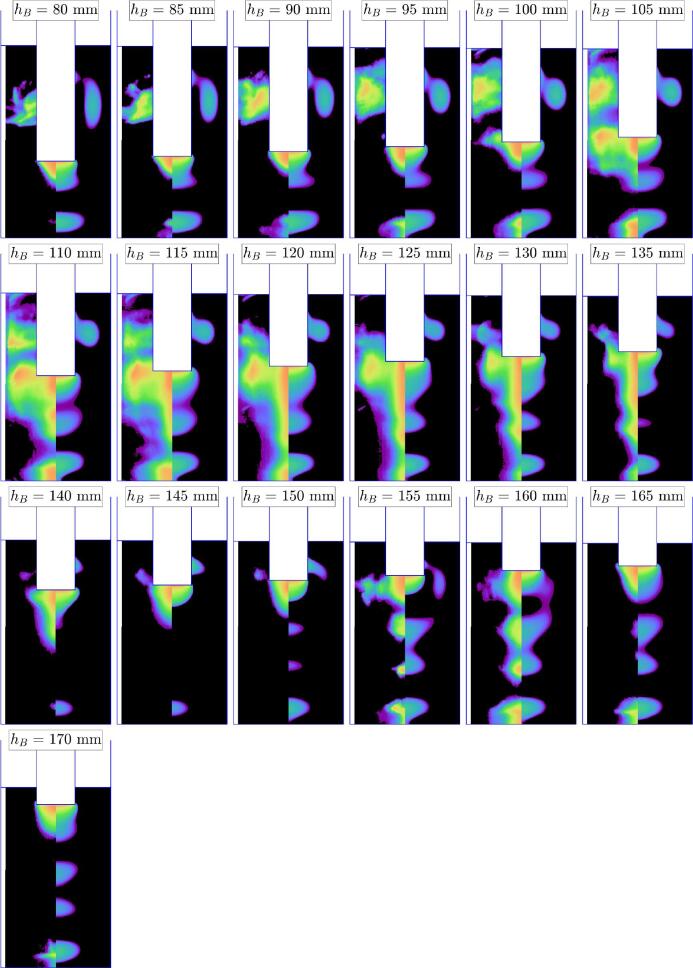
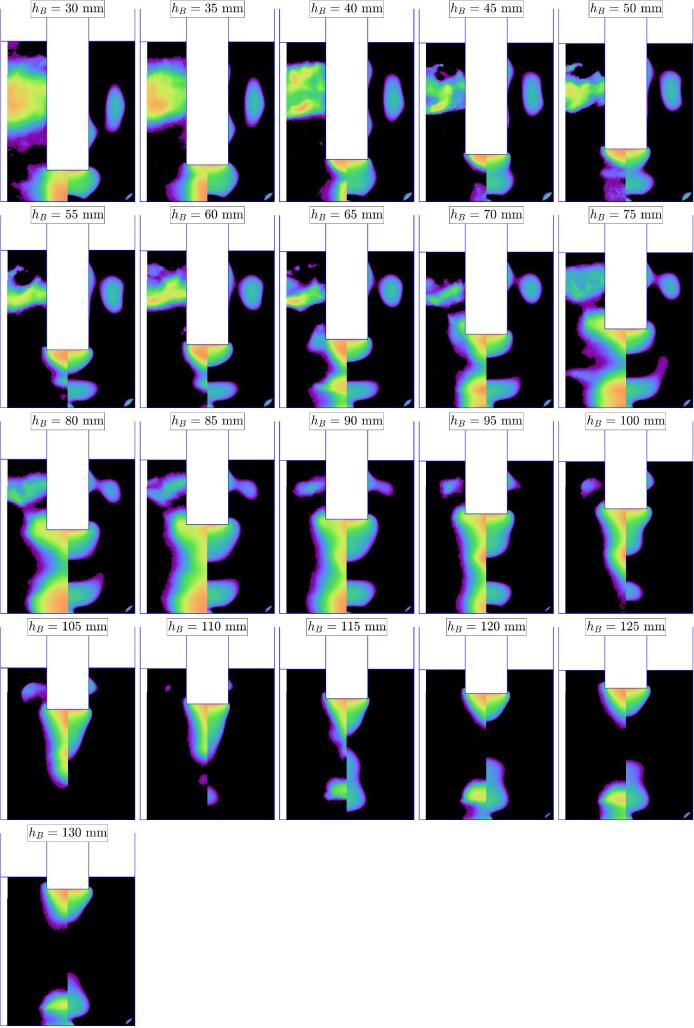
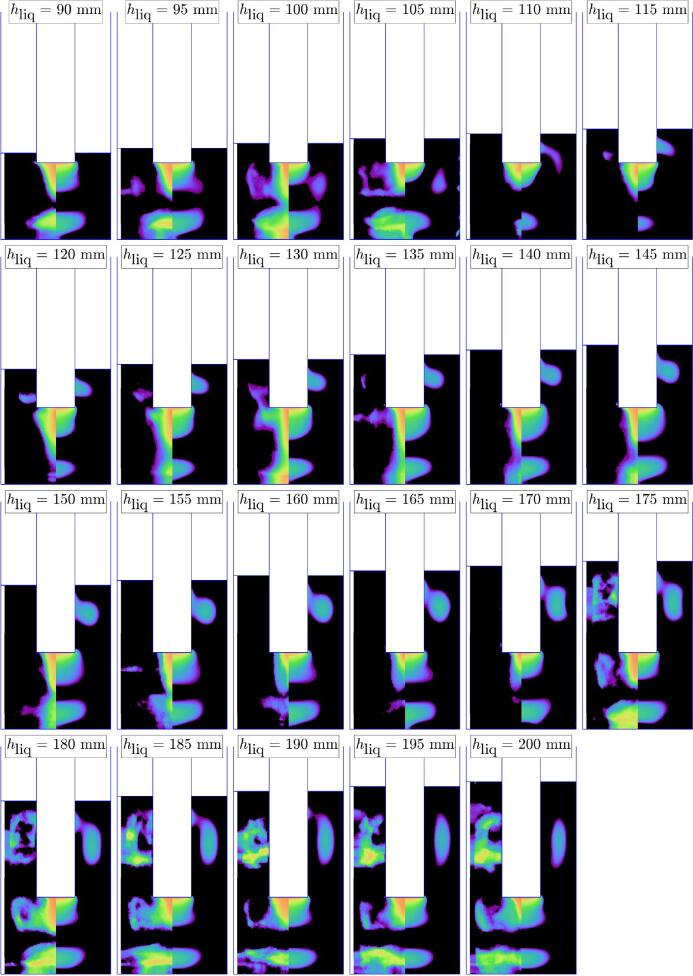
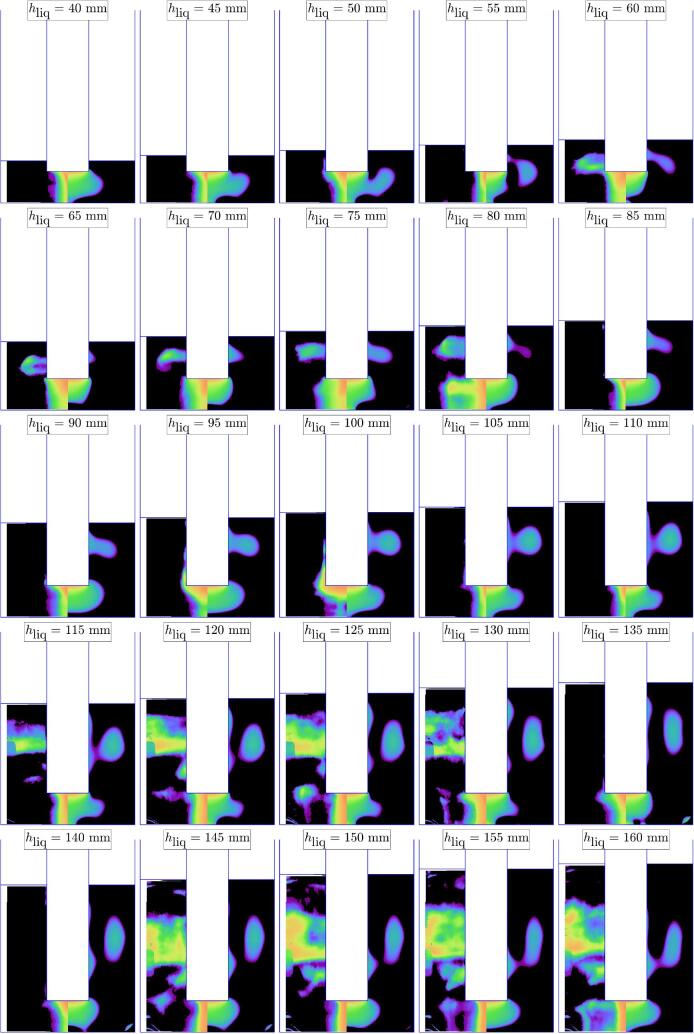
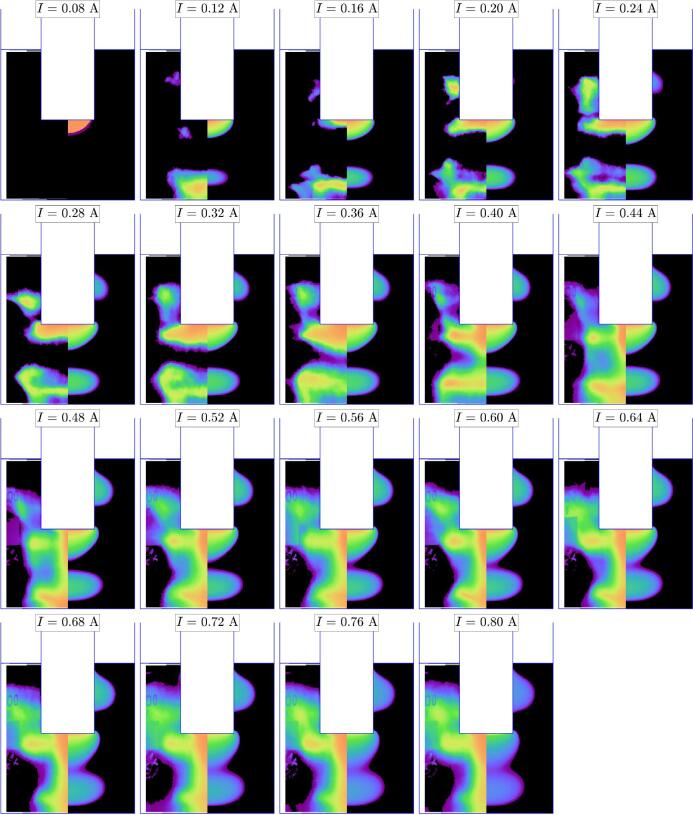
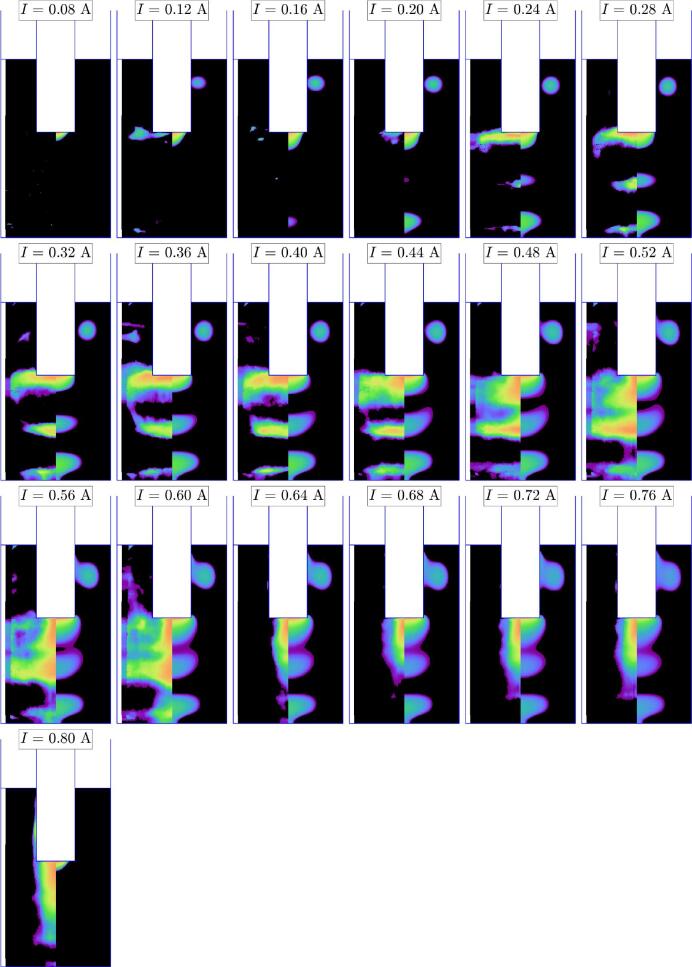
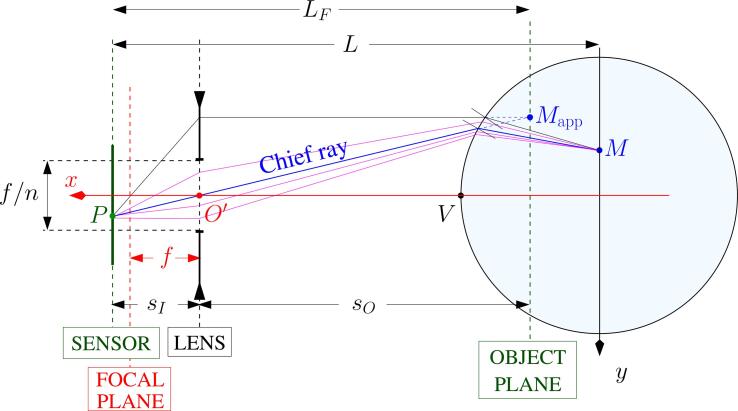
This investigation focuses on the influence of geometric factors on cavitational activity within a 20kHz sonoreactor containing water. Three vessels with different shapes were used, and the transducer immersion depth and liquid height were varied, resulting in a total of 126 experiments conducted under constant driving current. For each one, the dissipated power was quantified using calorimetry, while luminol mapping was employed to identify the shape and location of cavitation zones. The raw images of blueish light emission were transformed into false colors and corrected to compensate for refraction by the water-glass and glass-air interfaces. Additionally, all configurations were simulated using a sonoreactor model that incorporates a nonlinear propagation of acoustic waves in cavitating liquids. A systematic visual comparison between luminol maps and color-plots displaying the computed bubble collapse temperature in bubbly regions was conducted. The calorimetric power exhibited a nearly constant yield of approximately 70% across all experiments, thus validating the transducer command strategy. However, the numerical predictions consistently overestimated the electrical and calorimetric powers by a factor of roughly 2, indicating an overestimation of dissipation in the cavitating liquid model. Geometric variations revealed non-monotonic relationships between transducer immersion depth and dissipated power, emphasizing the importance of geometric effects in sonoreactor. Complex features were revealed by luminol maps, exhibiting appearance, disappearance, and merging of different luminol zones. In certain parametric regions, the luminol bright regions are reminiscent of linear eigenmodes of the water/vessel system. In the complementary parametric space, these structures either combine with, or are obliterated by typical elongated axial structures. The latter were found to coincide with an increased calorimetric power, and are conjectured to result from a strong cavitation field beneath the transducer producing acoustic streaming. Similar methods were applied to an additional set of 57 experiments conducted under constant geometry but with varying current, and suggested that the transition to elongated structures occurs above some amplitude threshold. While the model partially reproduced some experimental observations, further refinement is required to accurately account for the intricate acoustic phenomena involved.
Keywords: Acoustic cavitation; Calorimetry; Simulation; Sono-chemiluminescense; Ultrasound.
Copyright © 2023 The Authors. Published by Elsevier B.V. All rights reserved.
Conflict of interest statement
Declaration of Competing Interest Olivier Louisnard reports financial support was provided by SinapTec to RAPSODEE center at IMT Mines-Albi. Laurie Barthe reports financial support was provided by SinapTec to the Laboratoire de Génie Chimique. Igor Garcia-Vargas reports a relationship with SinapTec that includes: employment and funding grants. The above-mentioned authors declare that they had full access to all of the data in this study and take complete responsibility for the integrity of the data and the accuracy of the data analysis.
Figures






References
-
- Matouq M.A.-D., Al-Anber Z.A. Ultrason. Sonochem. 2007;14(3):393–397. - PubMed
-
- Agarkoti C., Thanekar P.D., Gogate P.R. J. Environ. Manage. 2021;300 - PubMed
-
- Vinatoru M. Ultrason. Sonochem. 2001;8(3):303–313. - PubMed
-
- Chen Y., Zheng H., Truong V.N.T., Xie G., Liu Q. Ultrason. Sonochem. 2020;63 - PubMed
LinkOut - more resources
Full Text Sources
