

Hybrid and adaptive control of functional electrical stimulation to correct hemiplegic gait for patients after stroke
- PMID: 37609119
- PMCID: PMC10441235
- DOI: 10.3389/fbioe.2023.1246014
Hybrid and adaptive control of functional electrical stimulation to correct hemiplegic gait for patients after stroke
Abstract
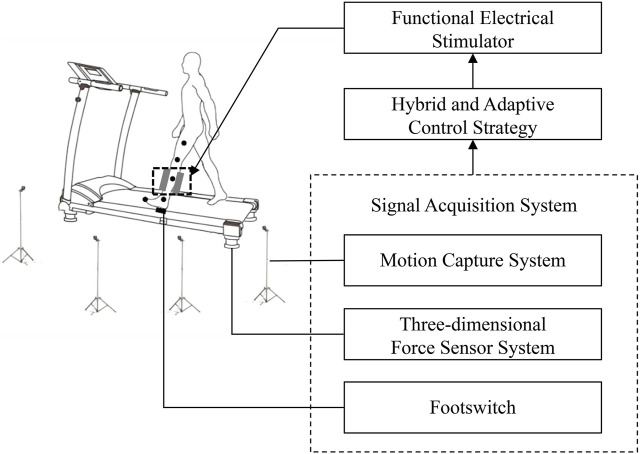
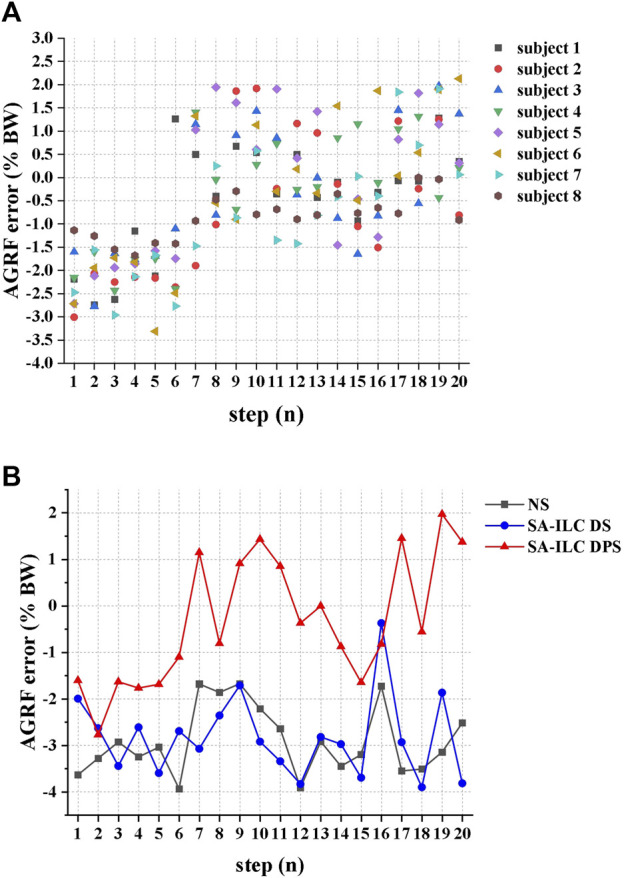
Introduction: Gait, as a fundamental human movement, necessitates the coordination of muscles across swing and stance phases. Functional electrical stimulation (FES) of the tibialis anterior (TA) has been widely applied to foot drop correction for patients with post-stroke during the swing phase. Although the gastrocnemius (GAS) during the stance phase is also affected, the Functional electrical stimulation of the gastrocnemius received less attention. Methods: To address this limitation, a timing- and intensity-adaptive Functional electrical stimulation control strategy was developed for both the TA and GAS. Each channel incorporates a speed-adaptive (SA) module to control stimulation timing and an iterative learning control (ILC) module to regulate the stimulation intensity. These modules rely on real-time kinematic or kinetic data during the swing or stance phase, respectively. The orthotic effects of the system were evaluated on eight patients with post-stroke foot drop. Gait kinematics and kinetics were assessed under three conditions: no stimulation (NS), Functional electrical stimulation to the ankle dorsiflexor tibialis anterior (SA-ILC DS) and FES to the tibialis anterior and the ankle plantarflexor gastrocnemius (SA-ILC DPS). Results: The ankle plantarflexion angle, the knee flexion angle, and the anterior ground reaction force (AGRF) in the SA-ILC DPS condition were significantly larger than those in the NS and SA-ILC DS conditions (p < 0.05). The maximum dorsiflexion angle during the swing phase in the SA-ILC DPS condition was similar to that in the SA-ILC DS condition, with both being significantly larger than the angle observed in the NS condition (p < 0.05). Furthermore, the angle error and force error relative to the set targets were minimized in the SA-ILC DPS condition. Discussion: The observed improvements can be ascribed to the appropriate stimulation timing and intensity provided by the SA-ILC DPS strategy. This study demonstrates that the hybrid and adaptive control strategy of functional electrical stimulation system offers a significant orthotic effect, and has considerable potential for future clinical application.
Keywords: functional electrical stimulation; hemiplegic gait; hybrid; iterative learning control; stroke.
Copyright © 2023 Dong, Wang, He, Zheng, Wang, Huang and Song.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures





Similar articles
-
Therapeutic and orthotic effects of an adaptive functional electrical stimulation system on gait biomechanics in participants with stroke.J Neuroeng Rehabil. 2025 Mar 18;22(1):62. doi: 10.1186/s12984-025-01577-0. J Neuroeng Rehabil. 2025. PMID: 40102928 Free PMC article.
-
Functional electrical stimulation to ankle dorsiflexor and plantarflexor using single foot switch in patients with hemiplegia from hemorrhagic stroke.Ann Rehabil Med. 2014 Jun;38(3):310-6. doi: 10.5535/arm.2014.38.3.310. Epub 2014 Jun 26. Ann Rehabil Med. 2014. PMID: 25024953 Free PMC article.
-
Functional electrical stimulation of ankle plantarflexor and dorsiflexor muscles: effects on poststroke gait.Stroke. 2009 Dec;40(12):3821-7. doi: 10.1161/STROKEAHA.109.560375. Epub 2009 Oct 15. Stroke. 2009. PMID: 19834018 Free PMC article. Clinical Trial.
-
Novel patterns of functional electrical stimulation have an immediate effect on dorsiflexor muscle function during gait for people poststroke.Phys Ther. 2010 Jan;90(1):55-66. doi: 10.2522/ptj.20090140. Epub 2009 Nov 19. Phys Ther. 2010. PMID: 19926681 Free PMC article. Review.
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
Cited by
-
Therapeutic and orthotic effects of an adaptive functional electrical stimulation system on gait biomechanics in participants with stroke.J Neuroeng Rehabil. 2025 Mar 18;22(1):62. doi: 10.1186/s12984-025-01577-0. J Neuroeng Rehabil. 2025. PMID: 40102928 Free PMC article.
References
-
- Arifin A., Watanabe T., Hoshimiya N. (2003). Fuzzy controller for cycle-to-cycle control of SwingPhase of FES-induced hemiplegic gait: A computer simulation in two-joints control. Int. Conf. IEEE Eng. Med. Biol. - Proc. 2, 1519–1522. 10.1109/iembs.2003.1279636 - DOI
-
- Arimoto S., Kawamura S., Miyazaki F. (1984). Bettering operation of Robots by learning. J. Robot. Syst. 1, 123–140. 10.1002/rob.4620010203 - DOI
-
- Cameron M. H. (2010). The WalkAide® functional electrical stimulation system - a novel therapeutic approach for foot drop in central nervous system disorders. Eur. Neurol. Rev. 5, 112. 10.17925/USN.2010.06.02.112 - DOI
LinkOut - more resources
Full Text Sources
Miscellaneous