

Central Pattern Generator (CPG)-Based Locomotion Control and Hydrodynamic Experiments of Synergistical Interaction between Pectoral Fins and Caudal Fin for Boxfish-like Robot
- PMID: 37622985
- PMCID: PMC10452859
- DOI: 10.3390/biomimetics8040380
Central Pattern Generator (CPG)-Based Locomotion Control and Hydrodynamic Experiments of Synergistical Interaction between Pectoral Fins and Caudal Fin for Boxfish-like Robot
Abstract
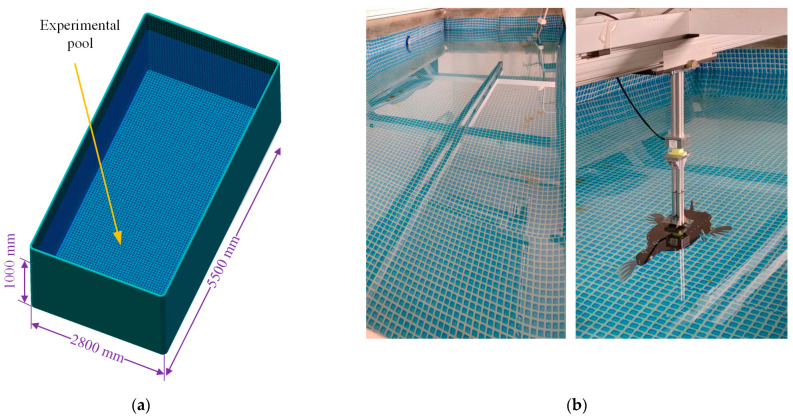
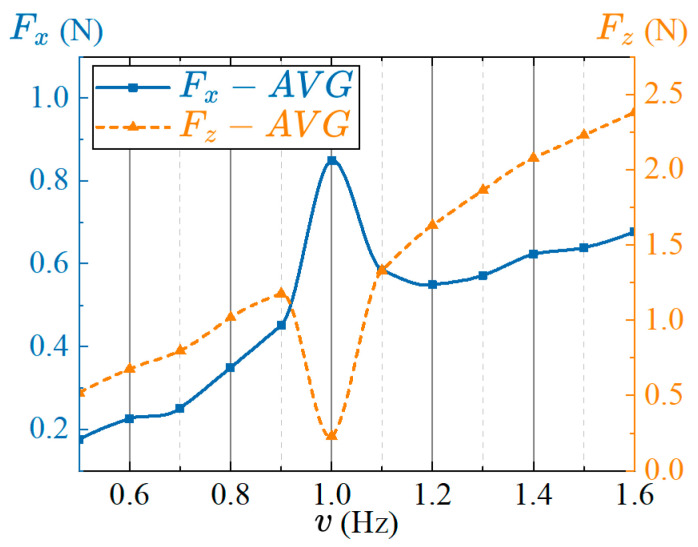
Locomotion control of synergistical interaction between fins has been one of the key problems in the field of robotic fish research owing to its contribution to improving and enhancing swimming performance. In this paper, the coordinated locomotion control of the boxfish-like robot with pectoral and caudal fins is studied, and the effects of different control parameters on the propulsion performance are quantitatively analyzed by using hydrodynamic experiments. First, an untethered boxfish-like robot with two pectoral fins and one caudal fin was designed. Second, a central pattern generator (CPG)-based controller is used to coordinate the motions of the pectoral and caudal fins to realize the bionic locomotion of the boxfish-like robot. Finally, extensive hydrodynamic experiments are conducted to explore the effects of different CPG parameters on the propulsion performance under the synergistic interaction of pectoral and caudal fins. Results show that the amplitude and frequency significantly affect the propulsion performance, and the propulsion ability is the best when the frequency is 1 Hz. Different phase lags and offset angles between twisting and flapping of the pectoral fin can generate positive and reverse forces, which realize the forward, backward, and pitching swimming by adjusting these parameters. This paper reveals for the first time the effects of different CPG parameters on the propulsion performance in the case of the synergistic interaction between the pectoral fins and the caudal fin using hydrodynamic experimental methods, which sheds light on the optimization of the design and control parameters of the robotic fish.
Keywords: CPG; hydrodynamic analysis; motion control; multifin synergy; robotic fish.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

















References
-
- Liu J., Hu H. Biological inspiration: From carangiform fish to multi-joint robotic fish. J. Bionic Eng. 2010;7:35–48. doi: 10.1016/S1672-6529(09)60184-0. - DOI
-
- Kopman V., Porfiri M. Design, Modeling, and Characterization of a Miniature Robotic Fish for Research and Education in Biomimetics and Bioinspiration. IEEE/ASME Trans. Mechatron. 2013;18:471–483. doi: 10.1109/TMECH.2012.2222431. - DOI
-
- Jian X., Zou T. A Review of Locomotion, Control, and Implementation of Robot Fish. J. Intell. Robot. Syst. 2022;106:37. doi: 10.1007/s10846-022-01726-w. - DOI
-
- Triantafyllou M.S., Triantafyllou G.S. An Efficient Swimming Machine. Sci. Am. 1995;272:64–70. doi: 10.1038/scientificamerican0395-64. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
