

Machine Learning for Human Motion Intention Detection
- PMID: 37631740
- PMCID: PMC10459653
- DOI: 10.3390/s23167203
Machine Learning for Human Motion Intention Detection
Abstract
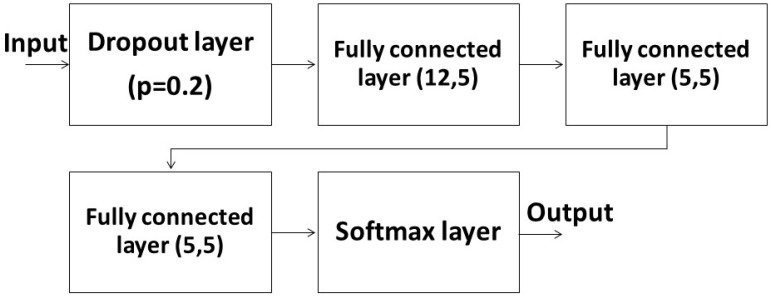
The gait pattern of exoskeleton control conflicting with the human operator's (the pilot) intention may cause awkward maneuvering or even injury. Therefore, it has been the focus of many studies to help decide the proper gait operation. However, the timing for the recognization plays a crucial role in the operation. The delayed detection of the pilot's intent can be equally undesirable to the exoskeleton operation. Instead of recognizing the motion, this study examines the possibility of identifying the transition between gaits to achieve in-time detection. This study used the data from IMU sensors for future mobile applications. Furthermore, we tested using two machine learning networks: a linearfFeedforward neural network and a long short-term memory network. The gait data are from five subjects for training and testing. The study results show that: 1. The network can successfully separate the transition period from the motion periods. 2. The detection of gait change from walking to sitting can be as fast as 0.17 s, which is adequate for future control applications. However, detecting the transition from standing to walking can take as long as 1.2 s. 3. This study also find that the network trained for one person can also detect movement changes for different persons without deteriorating the performance.
Keywords: feedforward neural network (FNN); human intention detection; human–robot interaction; inertial measurement unit (IMU); long short-term memory (LSTM).
Conflict of interest statement
The authors declare no conflict of interest.
Figures





References
-
- Cangelosi A., Invitto S. Human-Robot Interaction and Neuroprosthetics: A review of new technologies. IEEE Consum. Electron. Mag. 2017;6:24–33. doi: 10.1109/MCE.2016.2614423. - DOI
-
- Zhang L., Liu G., Han B., Wang Z., Zhang T. sEMG Based Human Motion Intention Recognition. J. Robot. 2019;2019:3679174. doi: 10.1155/2019/3679174. - DOI
-
- Anam K., Al-Jumaily A.A. Active Exoskeleton Control Systems: State of the Art. Procedia Eng. 2012;41:988–994. doi: 10.1016/j.proeng.2012.07.273. - DOI
-
- Song G., Huang R., Cheng H., Chen Q. Learning Coupled Parameters with Continuous Domains for Human-powered Lower Exoskeleton; Proceedings of the ICARM 2018–2018 3rd International Conference on Advanced Robotics and Mechatronics; Singapore. 18–20 July 2018; pp. 189–194. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
