

TBC-YOLOv7: a refined YOLOv7-based algorithm for tea bud grading detection
- PMID: 37662161
- PMCID: PMC10469839
- DOI: 10.3389/fpls.2023.1223410
TBC-YOLOv7: a refined YOLOv7-based algorithm for tea bud grading detection
Abstract
Introduction: Accurate grading identification of tea buds is a prerequisite for automated tea-picking based on machine vision system. However, current target detection algorithms face challenges in detecting tea bud grades in complex backgrounds. In this paper, an improved YOLOv7 tea bud grading detection algorithm TBC-YOLOv7 is proposed.
Methods: The TBC-YOLOv7 algorithm incorporates the transformer architecture design in the natural language processing field, integrating the transformer module based on the contextual information in the feature map into the YOLOv7 algorithm, thereby facilitating self-attention learning and enhancing the connection of global feature information. To fuse feature information at different scales, the TBC-YOLOv7 algorithm employs a bidirectional feature pyramid network. In addition, coordinate attention is embedded into the critical positions of the network to suppress useless background details while paying more attention to the prominent features of tea buds. The SIOU loss function is applied as the bounding box loss function to improve the convergence speed of the network.
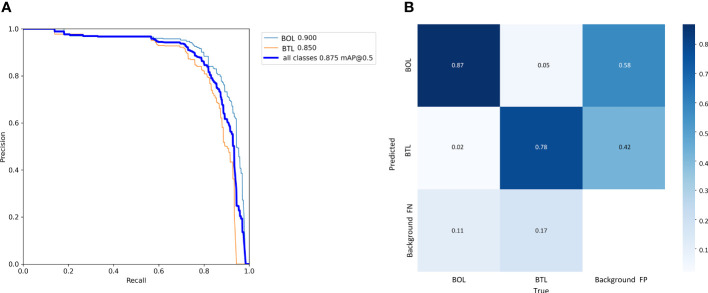
Result: The results of the experiments indicate that the TBC-YOLOv7 is effective in all grades of samples in the test set. Specifically, the model achieves a precision of 88.2% and 86.9%, with corresponding recall of 81% and 75.9%. The mean average precision of the model reaches 87.5%, 3.4% higher than the original YOLOv7, with average precision values of up to 90% for one bud with one leaf. Furthermore, the F1 score reaches 0.83. The model's performance outperforms the YOLOv7 model in terms of the number of parameters. Finally, the results of the model detection exhibit a high degree of correlation with the actual manual annotation results ( =0.89), with the root mean square error of 1.54.
Discussion: The TBC-YOLOv7 model proposed in this paper exhibits superior performance in vision recognition, indicating that the improved YOLOv7 model fused with transformer-style module can achieve higher grading accuracy on densely growing tea buds, thereby enables the grade detection of tea buds in practical scenarios, providing solution and technical support for automated collection of tea buds and the judging of grades.
Keywords: BiFPN; CA; SIoU; YOLOv7; contextual transformer; tea bud grading detection.
Copyright © 2023 Wang, Wu and Zheng.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures














References
-
- Mei Y., Zhang S. (2022). China tea production and sales situation report. Available at: https://www.ctma.com.cn/index/index/zybg/id/17/.
-
- Barbedo J. G. A. (2018). Factors influencing the use of deep learning for plant disease recognition. Biosyst. Eng. 172, 84–91. doi: 10.1016/J.BIOSYSTEMSENG.2018.05.013 - DOI
-
- Bochkovskiy A., Wang C.-Y., Liao H.-Y. M. (2020) YOLOv4: optimal speed and accuracy of object detection. Available at: http://arxiv.org/abs/2004.10934.
-
- Carion N., Massa F., Synnaeve G., Usunier N., Kirillov A., Zagoruyko S. (2020) End-to-end object detection with transformers. Available at: http://arxiv.org/abs/2005.12872.
-
- Chen Y. T., Chen S. F. (2020). Localizing plucking points of tea leaves using deep convolutional neural networks. Comput. Electron. Agric. 171, 105298. doi: 10.1016/J.COMPAG.2020.105298 - DOI
LinkOut - more resources
Full Text Sources