

Measuring uncertainty in human visual segmentation
- PMID: 37747914
- PMCID: PMC10553811
- DOI: 10.1371/journal.pcbi.1011483
Measuring uncertainty in human visual segmentation
Abstract
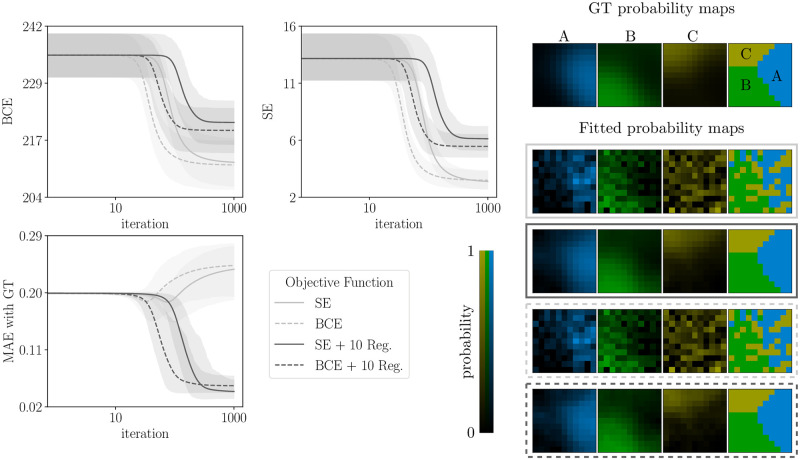
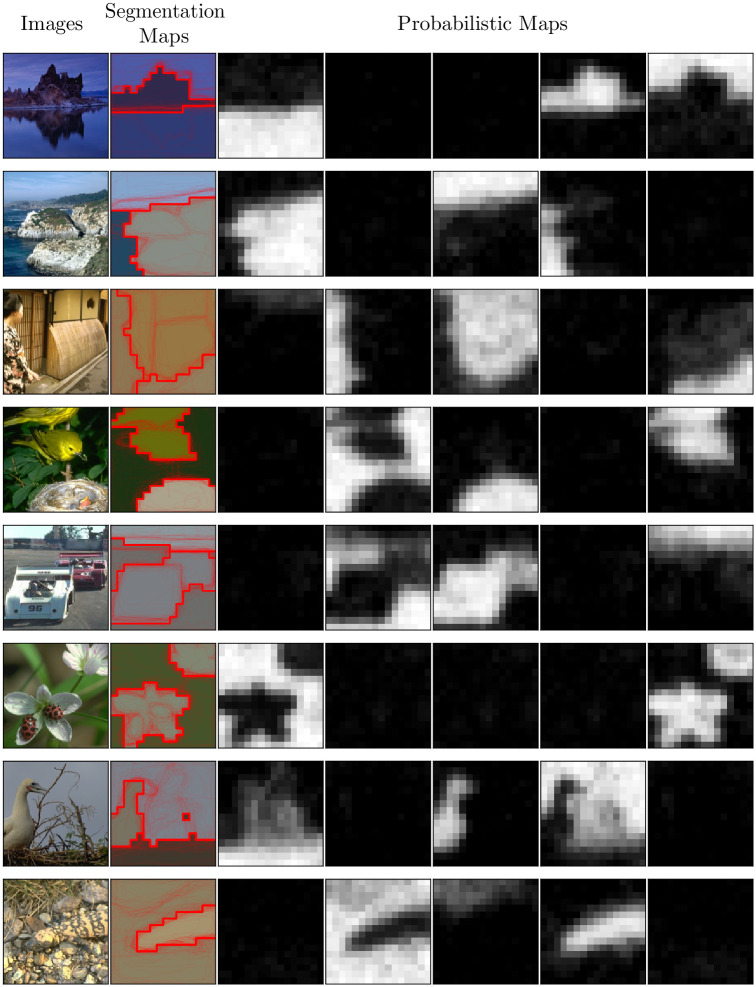
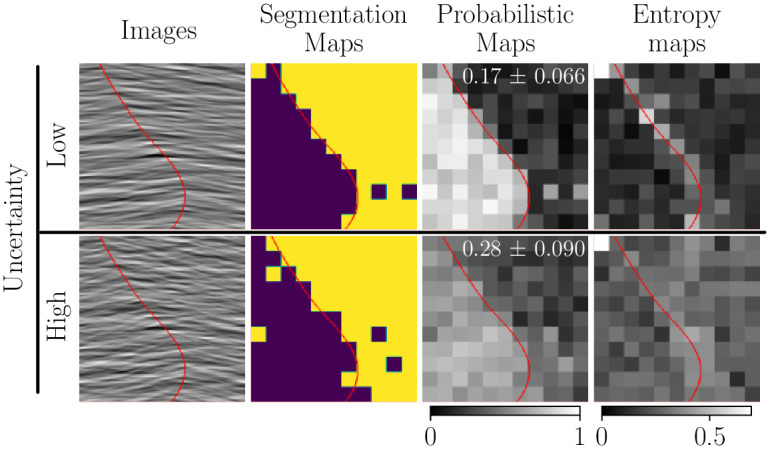
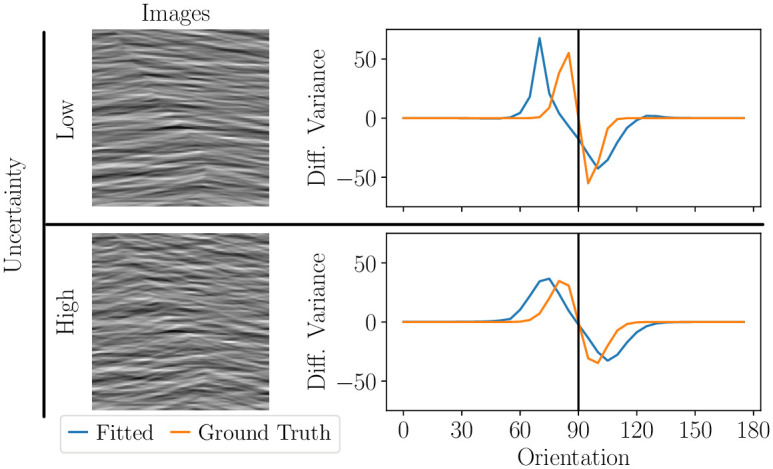
Segmenting visual stimuli into distinct groups of features and visual objects is central to visual function. Classical psychophysical methods have helped uncover many rules of human perceptual segmentation, and recent progress in machine learning has produced successful algorithms. Yet, the computational logic of human segmentation remains unclear, partially because we lack well-controlled paradigms to measure perceptual segmentation maps and compare models quantitatively. Here we propose a new, integrated approach: given an image, we measure multiple pixel-based same-different judgments and perform model-based reconstruction of the underlying segmentation map. The reconstruction is robust to several experimental manipulations and captures the variability of individual participants. We demonstrate the validity of the approach on human segmentation of natural images and composite textures. We show that image uncertainty affects measured human variability, and it influences how participants weigh different visual features. Because any putative segmentation algorithm can be inserted to perform the reconstruction, our paradigm affords quantitative tests of theories of perception as well as new benchmarks for segmentation algorithms.
Copyright: © 2023 Vacher et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures





Update of
-
Measuring uncertainty in human visual segmentation.ArXiv [Preprint]. 2023 Oct 11:arXiv:2301.07807v3. ArXiv. 2023. Update in: PLoS Comput Biol. 2023 Sep 25;19(9):e1011483. doi: 10.1371/journal.pcbi.1011483. PMID: 36824425 Free PMC article. Updated. Preprint.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
