

From Brain Models to Robotic Embodied Cognition: How Does Biological Plausibility Inform Neuromorphic Systems?
- PMID: 37759917
- PMCID: PMC10526461
- DOI: 10.3390/brainsci13091316
From Brain Models to Robotic Embodied Cognition: How Does Biological Plausibility Inform Neuromorphic Systems?
Abstract
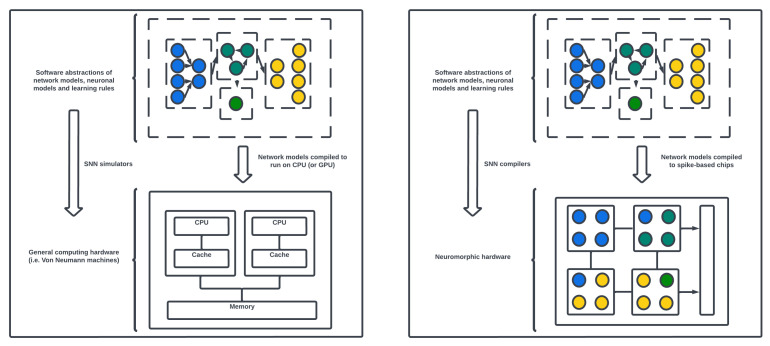
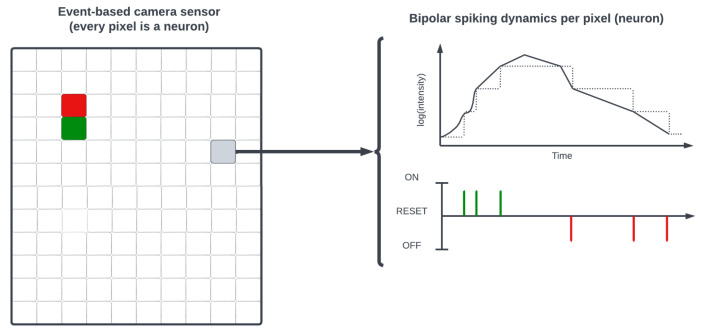
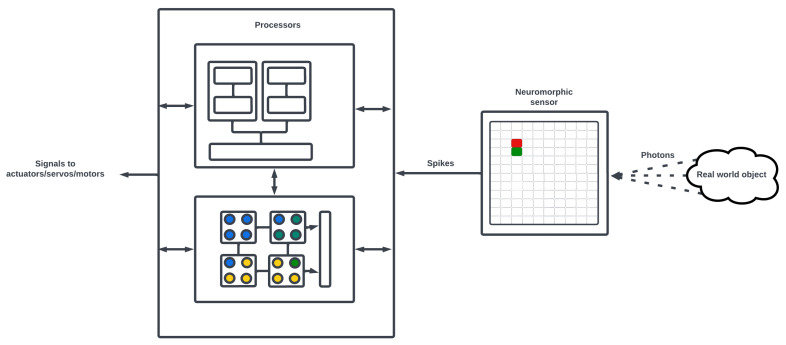
We examine the challenging "marriage" between computational efficiency and biological plausibility-A crucial node in the domain of spiking neural networks at the intersection of neuroscience, artificial intelligence, and robotics. Through a transdisciplinary review, we retrace the historical and most recent constraining influences that these parallel fields have exerted on descriptive analysis of the brain, construction of predictive brain models, and ultimately, the embodiment of neural networks in an enacted robotic agent. We study models of Spiking Neural Networks (SNN) as the central means enabling autonomous and intelligent behaviors in biological systems. We then provide a critical comparison of the available hardware and software to emulate SNNs for investigating biological entities and their application on artificial systems. Neuromorphics is identified as a promising tool to embody SNNs in real physical systems and different neuromorphic chips are compared. The concepts required for describing SNNs are dissected and contextualized in the new no man's land between cognitive neuroscience and artificial intelligence. Although there are recent reviews on the application of neuromorphic computing in various modules of the guidance, navigation, and control of robotic systems, the focus of this paper is more on closing the cognition loop in SNN-embodied robotics. We argue that biologically viable spiking neuronal models used for electroencephalogram signals are excellent candidates for furthering our knowledge of the explainability of SNNs. We complete our survey by reviewing different robotic modules that can benefit from neuromorphic hardware, e.g., perception (with a focus on vision), localization, and cognition. We conclude that the tradeoff between symbolic computational power and biological plausibility of hardware can be best addressed by neuromorphics, whose presence in neurorobotics provides an accountable empirical testbench for investigating synthetic and natural embodied cognition. We argue this is where both theoretical and empirical future work should converge in multidisciplinary efforts involving neuroscience, artificial intelligence, and robotics.
Keywords: embodied cognition; neuromorphics; neurorobotics; spiking neural networks.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Neuromorphic Sentiment Analysis Using Spiking Neural Networks.Sensors (Basel). 2023 Sep 6;23(18):7701. doi: 10.3390/s23187701. Sensors (Basel). 2023. PMID: 37765758 Free PMC article.
-
A Survey of Robotics Control Based on Learning-Inspired Spiking Neural Networks.Front Neurorobot. 2018 Jul 6;12:35. doi: 10.3389/fnbot.2018.00035. eCollection 2018. Front Neurorobot. 2018. PMID: 30034334 Free PMC article. Review.
-
Advancements in Algorithms and Neuromorphic Hardware for Spiking Neural Networks.Neural Comput. 2022 May 19;34(6):1289-1328. doi: 10.1162/neco_a_01499. Neural Comput. 2022. PMID: 35534005 Review.
-
Neuromorphic implementations of neurobiological learning algorithms for spiking neural networks.Neural Netw. 2015 Dec;72:152-67. doi: 10.1016/j.neunet.2015.07.004. Epub 2015 Aug 18. Neural Netw. 2015. PMID: 26422422
-
Design Space Exploration of Hardware Spiking Neurons for Embedded Artificial Intelligence.Neural Netw. 2020 Jan;121:366-386. doi: 10.1016/j.neunet.2019.09.024. Epub 2019 Sep 26. Neural Netw. 2020. PMID: 31593842
Cited by
-
An accurate and fast learning approach in the biologically spiking neural network.Sci Rep. 2025 Feb 24;15(1):6585. doi: 10.1038/s41598-025-90113-0. Sci Rep. 2025. PMID: 39994277 Free PMC article.
-
Application of Event Cameras and Neuromorphic Computing to VSLAM: A Survey.Biomimetics (Basel). 2024 Jul 20;9(7):444. doi: 10.3390/biomimetics9070444. Biomimetics (Basel). 2024. PMID: 39056885 Free PMC article. Review.
-
Neuromorphic computing for robotic vision: algorithms to hardware advances.Commun Eng. 2025 Aug 13;4(1):152. doi: 10.1038/s44172-025-00492-5. Commun Eng. 2025. PMID: 40804110 Free PMC article. Review.
-
Advances in Diagnostic Tools and Therapeutic Approaches for Gliomas: A Comprehensive Review.Sensors (Basel). 2023 Dec 15;23(24):9842. doi: 10.3390/s23249842. Sensors (Basel). 2023. PMID: 38139688 Free PMC article. Review.
References
-
- Davies M., Srinivasa N., Lin T.H., Chinya G., Cao Y., Choday S.H., Dimou G., Joshi P., Imam N., Jain S., et al. Loihi: A Neuromorphic Manycore Processor with On-Chip Learning. IEEE Micro. 2018;38:82–99. doi: 10.1109/MM.2018.112130359. - DOI
-
- Alrøe H.F., Noe E. Second-Order Science of Interdisciplinary Research: A Polyocular Framework for Wicked Problems. Constr. Found. 2014;10:65–76.
-
- Law D. Searle, Subsymbolic Functionalism and Synthetic Intelligence. Department of Computer Sciences, The University of Texas at Austin; Austin, TX, USA: 1994. Technical Report.
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
