

Development of a New Wearable Device for the Characterization of Hand Tremor
- PMID: 37760127
- PMCID: PMC10525186
- DOI: 10.3390/bioengineering10091025
Development of a New Wearable Device for the Characterization of Hand Tremor
Abstract
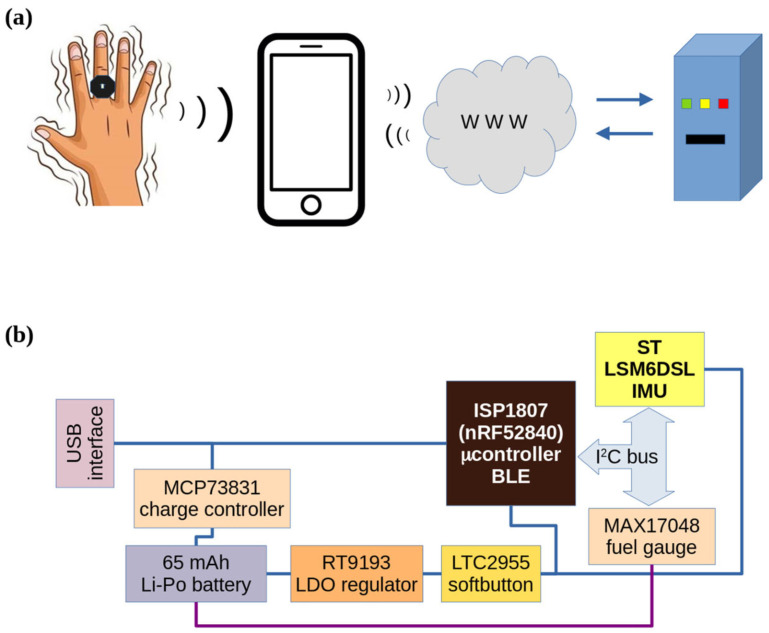
Rest tremor (RT) is observed in subjects with Parkinson's disease (PD) and Essential Tremor (ET). Electromyography (EMG) studies have shown that PD subjects exhibit alternating contractions of antagonistic muscles involved in tremors, while the contraction pattern of antagonistic muscles is synchronous in ET subjects. Therefore, the RT pattern can be used as a potential biomarker for differentiating PD from ET subjects. In this study, we developed a new wearable device and method for differentiating alternating from a synchronous RT pattern using inertial data. The novelty of our approach relies on the fact that the evaluation of synchronous or alternating tremor patterns using inertial sensors has never been described so far, and current approaches to evaluate the tremor patterns are based on surface EMG, which may be difficult to carry out for non-specialized operators. This new device, named "RT-Ring", is based on a six-axis inertial measurement unit and a Bluetooth Low-Energy microprocessor, and can be worn on a finger of the tremulous hand. A mobile app guides the operator through the whole acquisition process of inertial data from the hand with RT, and the prediction of tremor patterns is performed on a remote server through machine learning (ML) models. We used two decision tree-based algorithms, XGBoost and Random Forest, which were trained on features extracted from inertial data and achieved a classification accuracy of 92% and 89%, respectively, in differentiating alternating from synchronous tremor segments in the validation set. Finally, the classification response (alternating or synchronous RT pattern) is shown to the operator on the mobile app within a few seconds. This study is the first to demonstrate that different electromyographic tremor patterns have their counterparts in terms of rhythmic movement features, thus making inertial data suitable for predicting the muscular contraction pattern of tremors.
Keywords: inertial signals; machine learning; pattern prediction; tremor pattern; wearable device.
Conflict of interest statement
The authors declare no conflict of interest.
Figures





Similar articles
-
RT-ring: a small wearable device for tremulous Parkinson's disease diagnosis in primary care.Front Neurol. 2025 Jan 27;16:1534205. doi: 10.3389/fneur.2025.1534205. eCollection 2025. Front Neurol. 2025. PMID: 39931548 Free PMC article.
-
Development and Validation of a New Wearable Mobile Device for the Automated Detection of Resting Tremor in Parkinson's Disease and Essential Tremor.Diagnostics (Basel). 2021 Jan 29;11(2):200. doi: 10.3390/diagnostics11020200. Diagnostics (Basel). 2021. PMID: 33573076 Free PMC article.
-
Temporal fluctuations of tremor signals from inertial sensor: a preliminary study in differentiating Parkinson's disease from essential tremor.Biomed Eng Online. 2015 Nov 4;14:101. doi: 10.1186/s12938-015-0098-1. Biomed Eng Online. 2015. PMID: 26530430 Free PMC article.
-
[Neurophysiologic study of tremor].Neurophysiol Clin. 2000 Apr;30(2):81-96. doi: 10.1016/s0987-7053(00)00060-5. Neurophysiol Clin. 2000. PMID: 10812577 Review. French.
-
Intelligent devices for assessing essential tremor: a comprehensive review.J Neurol. 2024 Aug;271(8):4733-4750. doi: 10.1007/s00415-024-12354-9. Epub 2024 May 31. J Neurol. 2024. PMID: 38816480 Review.
Cited by
-
Simple biomarkers to distinguish Parkinson's disease from its mimics in clinical practice: a comprehensive review and future directions.Front Neurol. 2024 Sep 19;15:1460576. doi: 10.3389/fneur.2024.1460576. eCollection 2024. Front Neurol. 2024. PMID: 39364423 Free PMC article. Review.
-
Recent Advances in Vehicle Driver Health Monitoring Systems.Sensors (Basel). 2025 Mar 14;25(6):1812. doi: 10.3390/s25061812. Sensors (Basel). 2025. PMID: 40292968 Free PMC article. Review.
-
Multi-Shared-Task Self-Supervised CNN-LSTM for Monitoring Free-Body Movement UPDRS-III Using Wearable Sensors.Bioengineering (Basel). 2024 Jul 7;11(7):689. doi: 10.3390/bioengineering11070689. Bioengineering (Basel). 2024. PMID: 39061771 Free PMC article.
-
RT-ring: a small wearable device for tremulous Parkinson's disease diagnosis in primary care.Front Neurol. 2025 Jan 27;16:1534205. doi: 10.3389/fneur.2025.1534205. eCollection 2025. Front Neurol. 2025. PMID: 39931548 Free PMC article.
-
The Effects of Hand Tremors on the Shooting Performance of Air Pistol Shooters with Different Skill Levels.Sensors (Basel). 2024 Apr 11;24(8):2438. doi: 10.3390/s24082438. Sensors (Basel). 2024. PMID: 38676055 Free PMC article.
References
-
- Bhatia K.P., Bain P., Bajaj N., Elble R.J., Hallett M., Louis E.D., Raethjen J., Stamelou M., Testa C.M., Deuschl G. Consensus Statement on the Classification of Tremors. From the Task Force on Tremor of the International Parkinson and Movement Disorder Society. Mov. Disord. 2018;33:75–87. doi: 10.1002/mds.27121. - DOI - PMC - PubMed
LinkOut - more resources
Full Text Sources
