

Using Deep Learning Models to Predict Prosthetic Ankle Torque
- PMID: 37765769
- PMCID: PMC10535406
- DOI: 10.3390/s23187712
Using Deep Learning Models to Predict Prosthetic Ankle Torque
Abstract
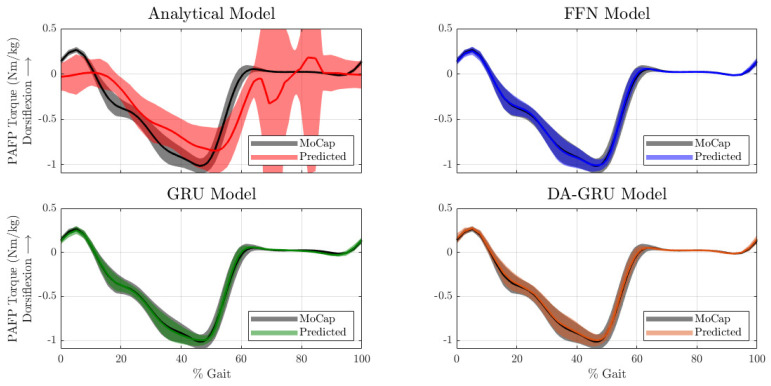
Inverse dynamics from motion capture is the most common technique for acquiring biomechanical kinetic data. However, this method is time-intensive, limited to a gait laboratory setting, and requires a large array of reflective markers to be attached to the body. A practical alternative must be developed to provide biomechanical information to high-bandwidth prosthesis control systems to enable predictive controllers. In this study, we applied deep learning to build dynamical system models capable of accurately estimating and predicting prosthetic ankle torque from inverse dynamics using only six input signals. We performed a hyperparameter optimization protocol that automatically selected the model architectures and learning parameters that resulted in the most accurate predictions. We show that the trained deep neural networks predict ankle torques one sample into the future with an average RMSE of 0.04 ± 0.02 Nm/kg, corresponding to 2.9 ± 1.6% of the ankle torque's dynamic range. Comparatively, a manually derived analytical regression model predicted ankle torques with a RMSE of 0.35 ± 0.53 Nm/kg, corresponding to 26.6 ± 40.9% of the ankle torque's dynamic range. In addition, the deep neural networks predicted ankle torque values half a gait cycle into the future with an average decrease in performance of 1.7% of the ankle torque's dynamic range when compared to the one-sample-ahead prediction. This application of deep learning provides an avenue towards the development of predictive control systems for powered limbs aimed at optimizing prosthetic ankle torque.
Keywords: biomechanics; deep neural networks; machine learning; robotic ankle prosthesis.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Figures





Similar articles
-
A Neural Network Estimation of Ankle Torques From Electromyography and Accelerometry.IEEE Trans Neural Syst Rehabil Eng. 2021;29:1624-1633. doi: 10.1109/TNSRE.2021.3104761. Epub 2021 Aug 26. IEEE Trans Neural Syst Rehabil Eng. 2021. PMID: 34388093
-
Paired nonlinear behavior of active and passive joint torques associated with preparation for walk-to-run gait transition.J Electromyogr Kinesiol. 2021 Apr;57:102527. doi: 10.1016/j.jelekin.2021.102527. Epub 2021 Jan 28. J Electromyogr Kinesiol. 2021. PMID: 33530026
-
Joint Torque Prediction via Hybrid Neuromusculoskeletal Modelling during Gait Using Statistical Ground Reaction Estimates: An Exploratory Study.Sensors (Basel). 2021 Oct 2;21(19):6597. doi: 10.3390/s21196597. Sensors (Basel). 2021. PMID: 34640917 Free PMC article.
-
Estimation of ground reaction forces and ankle moment with multiple, low-cost sensors.J Neuroeng Rehabil. 2015 Oct 14;12:90. doi: 10.1186/s12984-015-0081-x. J Neuroeng Rehabil. 2015. PMID: 26467753 Free PMC article.
-
Advances in Powered Ankle-Foot Prostheses.Crit Rev Biomed Eng. 2018;46(2):93-108. doi: 10.1615/CritRevBiomedEng.2018025232. Crit Rev Biomed Eng. 2018. PMID: 30055526 Review.
Cited by
-
Development of an individualized dementia risk prediction model using deep learning survival analysis incorporating genetic and environmental factors.Alzheimers Res Ther. 2024 Dec 30;16(1):278. doi: 10.1186/s13195-024-01663-w. Alzheimers Res Ther. 2024. PMID: 39736679 Free PMC article.
-
A Deep Learning Framework for End-to-End Control of Powered Prostheses.IEEE Robot Autom Lett. 2024 May;9(5):3988-3994. doi: 10.1109/lra.2024.3374189. Epub 2024 Mar 6. IEEE Robot Autom Lett. 2024. PMID: 40012860 Free PMC article.
References
-
- Teramae T., Noda T., Morimoto J. EMG-Based Model Predictive Control for Physical Human–Robot Interaction: Application for Assist-As-Needed Control. IEEE Robot. Autom. Lett. 2018;3:210–217. doi: 10.1109/LRA.2017.2737478. - DOI
-
- Özen O., Traversa F., Gadi S., Buetler K.A., Nef T., Marchal-Crespo L. Multi-purpose Robotic Training Strategies for Neurorehabilitation with Model Predictive Controllers; Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR); Toroto, ON, Canada. 24–28 June 2019; pp. 754–759. - DOI - PubMed
-
- Winter D.A. Kinematic and kinetic patterns in human gait: Variability and compensating effects. Hum. Mov. Sci. 1984;3:51–76. doi: 10.1016/0167-9457(84)90005-8. - DOI
