

Characterizing Bodyweight-Supported Treadmill Walking on Land and Underwater Using Foot-Worn Inertial Measurement Units and Machine Learning for Gait Event Detection
- PMID: 37766002
- PMCID: PMC10536282
- DOI: 10.3390/s23187945
Characterizing Bodyweight-Supported Treadmill Walking on Land and Underwater Using Foot-Worn Inertial Measurement Units and Machine Learning for Gait Event Detection
Abstract
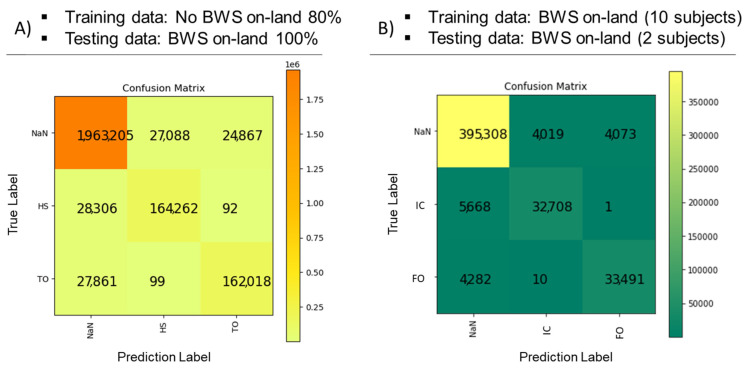
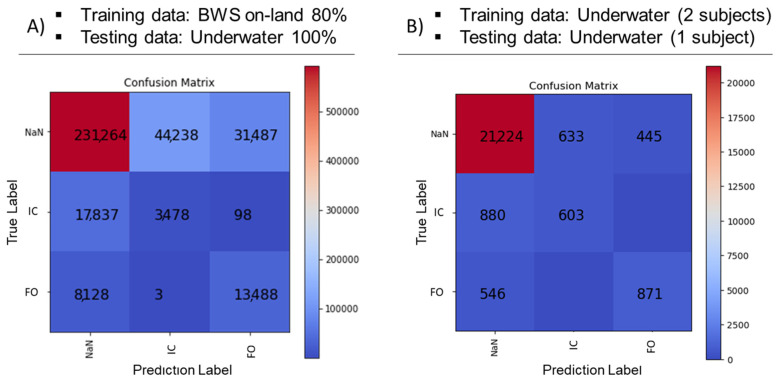
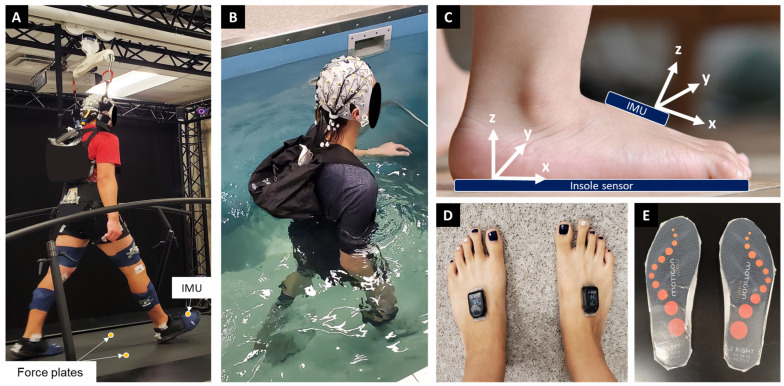
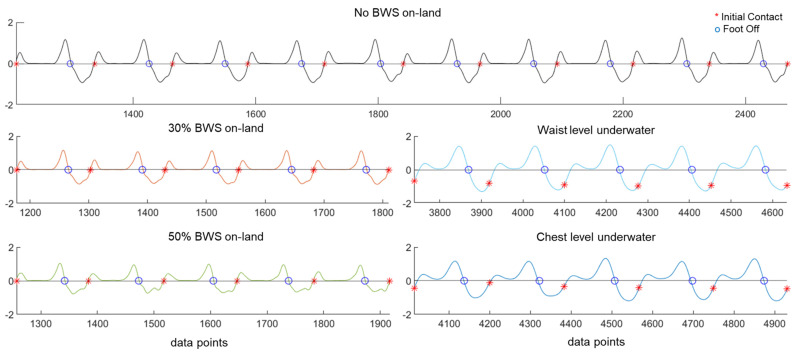
Gait rehabilitation commonly relies on bodyweight unloading mechanisms, such as overhead mechanical support and underwater buoyancy. Lightweight and wireless inertial measurement unit (IMU) sensors provide a cost-effective tool for quantifying body segment motions without the need for video recordings or ground reaction force measures. Identifying the instant when the foot contacts and leaves the ground from IMU data can be challenging, often requiring scrupulous parameter selection and researcher supervision. We aimed to assess the use of machine learning methods for gait event detection based on features from foot segment rotational velocity using foot-worn IMU sensors during bodyweight-supported treadmill walking on land and underwater. Twelve healthy subjects completed on-land treadmill walking with overhead mechanical bodyweight support, and three subjects completed underwater treadmill walking. We placed IMU sensors on the foot and recorded motion capture and ground reaction force data on land and recorded IMU sensor data from wireless foot pressure insoles underwater. To detect gait events based on IMU data features, we used random forest machine learning classification. We achieved high gait event detection accuracy (95-96%) during on-land bodyweight-supported treadmill walking across a range of gait speeds and bodyweight support levels. Due to biomechanical changes during underwater treadmill walking compared to on land, accurate underwater gait event detection required specific underwater training data. Using single-axis IMU data and machine learning classification, we were able to effectively identify gait events during bodyweight-supported treadmill walking on land and underwater. Robust and automated gait event detection methods can enable advances in gait rehabilitation.
Keywords: gait event detection; machine learning; mechanical body weight support; reduced gravity; underwater walking.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Cortical Processing and Lower Limb Muscle Activity Increase During Bodyweight Supported Treadmill Locomotion Underwater Compared to On-Land.IEEE Trans Neural Syst Rehabil Eng. 2025;33:1729-1739. doi: 10.1109/TNSRE.2025.3566301. Epub 2025 May 7. IEEE Trans Neural Syst Rehabil Eng. 2025. PMID: 40310736
-
A machine learning approach to real-time calculation of joint angles during walking and running using self-placed inertial measurement units.Gait Posture. 2025 May;118:85-91. doi: 10.1016/j.gaitpost.2025.01.028. Epub 2025 Jan 26. Gait Posture. 2025. PMID: 39914248
-
Estimation of Lower Extremity Joint Moments and 3D Ground Reaction Forces Using IMU Sensors in Multiple Walking Conditions: A Deep Learning Approach.IEEE J Biomed Health Inform. 2023 Jun;27(6):2829-2840. doi: 10.1109/JBHI.2023.3262164. Epub 2023 Jun 5. IEEE J Biomed Health Inform. 2023. PMID: 37030855
-
Automatic Body Segment and Side Recognition of an Inertial Measurement Unit Sensor during Gait.Sensors (Basel). 2023 Mar 29;23(7):3587. doi: 10.3390/s23073587. Sensors (Basel). 2023. PMID: 37050647 Free PMC article.
-
A Scoping Review on Minimum Foot Clearance Measurement: Sensing Modalities.Int J Environ Res Public Health. 2021 Oct 15;18(20):10848. doi: 10.3390/ijerph182010848. Int J Environ Res Public Health. 2021. PMID: 34682592 Free PMC article.
References
-
- Kong W., Sessa S., Cosentino S., Zecca M., Saito K., Wang C., Imtiaz U., Lin Z., Bartolomeo L., Ishii H. Development of a real-time IMU-based motion capture system for gait rehabilitation; Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO); Shenzhen, China. 12–14 December 2013; Piscataway, NJ, USA: IEEE; 2013. pp. 2100–2105.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
