

Robust IMU-Based Mitigation of Human Body Shadowing in UWB Indoor Positioning
- PMID: 37837122
- PMCID: PMC10575093
- DOI: 10.3390/s23198289
Robust IMU-Based Mitigation of Human Body Shadowing in UWB Indoor Positioning
Abstract
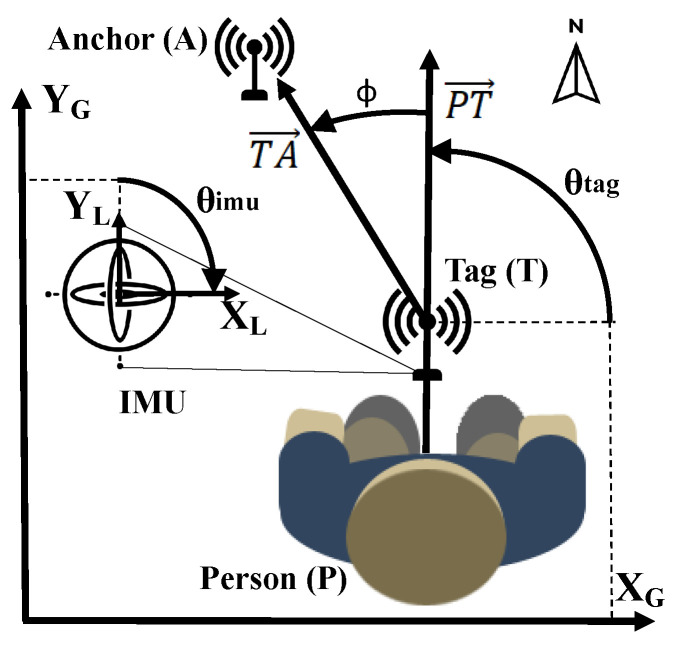
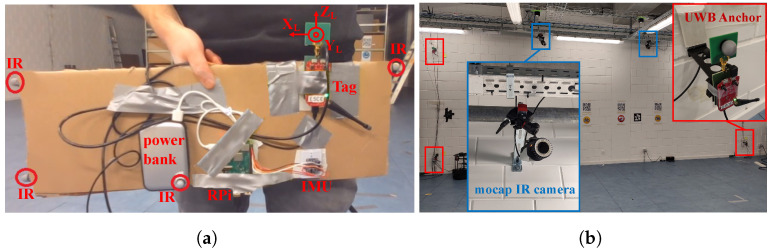
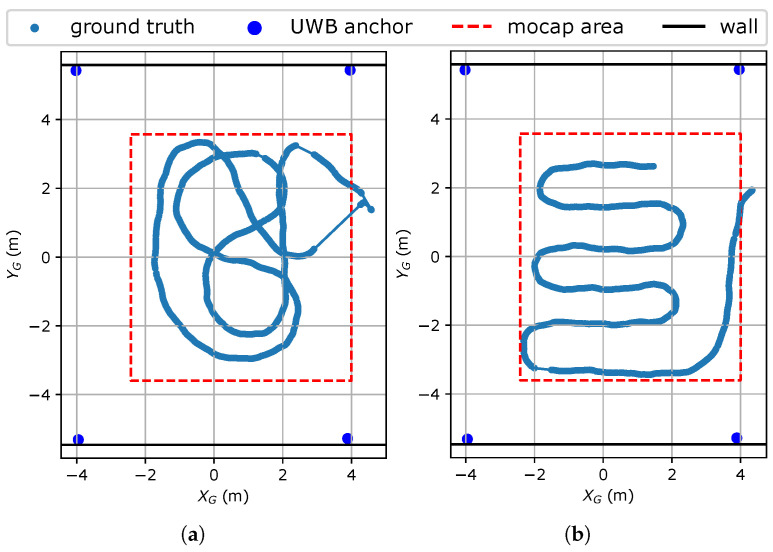
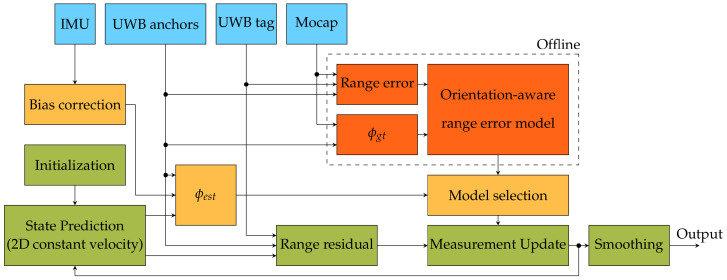
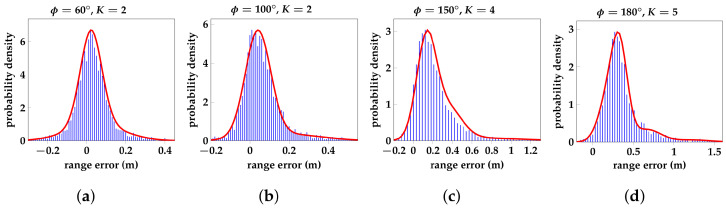
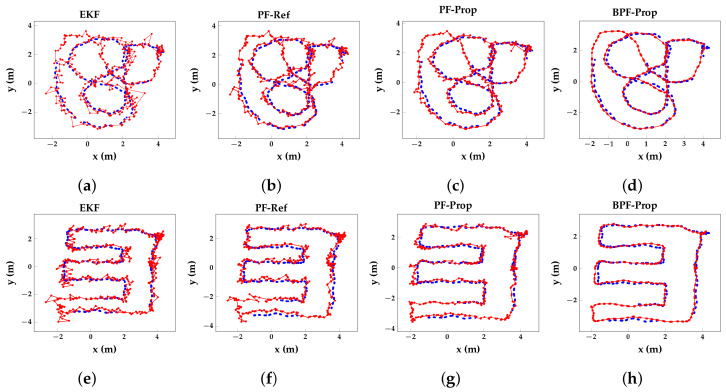
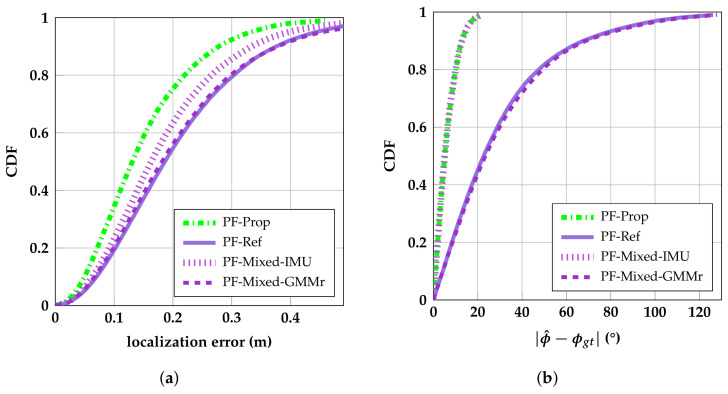
Ultra-wideband (UWB) indoor positioning systems have the potential to achieve sub-decimeter-level accuracy. However, the ranging performance degrades significantly under non-line-of-sight (NLoS) conditions. The detection and mitigation of NLoS conditions is a complex problem and has been the subject of many works over the past decades. When localizing pedestrians, human body shadowing (HBS) is a particular and specific cause of NLoS. In this paper, we present an HBS mitigation strategy based on the orientation of the body and tag relative to the UWB anchors. Our HBS mitigation strategy involves a robust range error model that interacts with a tracking algorithm. The model consists of a bank of Gaussian Mixture Models (GMMs), from which an appropriate GMM is selected based on the relative body-tag-anchor orientation. The relative orientation is estimated by means of an inertial measurement unit (IMU) attached to the tag and a candidate position provided by the tracking algorithm. The selected GMM is used as a likelihood function for the tracking algorithm to improve localization accuracy. Our proposed approach was realized for two tracking algorithms. We validated the implemented algorithms on dynamic UWB ranging measurements, which were performed in an industrial lab environment. The proposed algorithms outperform other state-of-the-art algorithms, achieving a 37% reduction of the p75 error.
Keywords: Gaussian mixture model; IMU; UWB; human body shadowing; indoor localization; particle filter.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




References
-
- Hu X., Luo Z., Jiang W. AGV Localization System Based on Ultra-Wideband and Vision Guidance. Electronics. 2020;9:448. doi: 10.3390/electronics9030448. - DOI
-
- Jiang L., Hoe L.N., Loon L.L. Integrated UWB and GPS location sensing system in hospital environment; Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications; Taichung, Taiwan. 15–17 June 2010; pp. 286–289. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
Miscellaneous
