

This is a preprint.
A click-based electrocorticographic brain-computer interface enables long-term high-performance switch-scan spelling
- PMID: 37841873
- PMCID: PMC10571601
- DOI: 10.21203/rs.3.rs-3158792/v1
A click-based electrocorticographic brain-computer interface enables long-term high-performance switch-scan spelling
Update in
-
A click-based electrocorticographic brain-computer interface enables long-term high-performance switch scan spelling.Commun Med (Lond). 2024 Oct 22;4(1):207. doi: 10.1038/s43856-024-00635-3. Commun Med (Lond). 2024. PMID: 39433597 Free PMC article.
Abstract
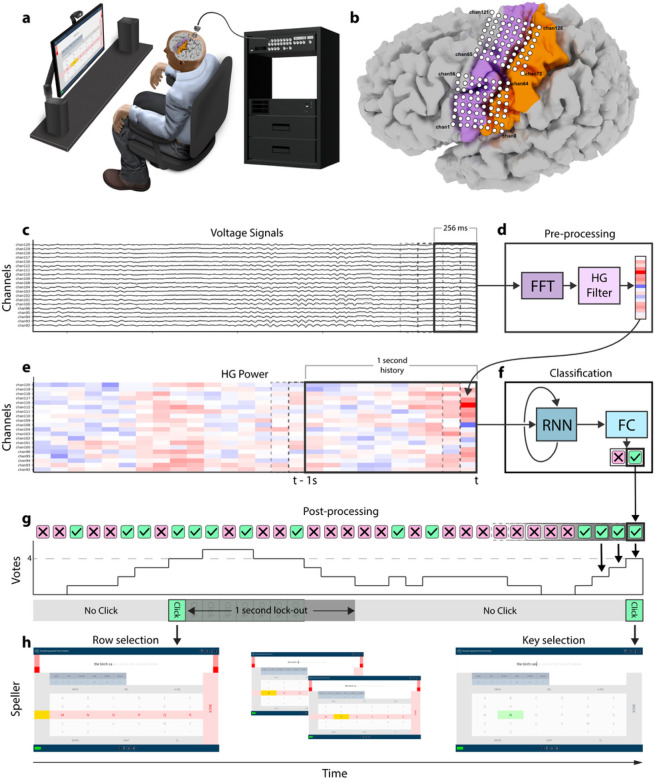
Background: Brain-computer interfaces (BCIs) can restore communication in movement- and/or speech-impaired individuals by enabling neural control of computer typing applications. Single command "click" decoders provide a basic yet highly functional capability.
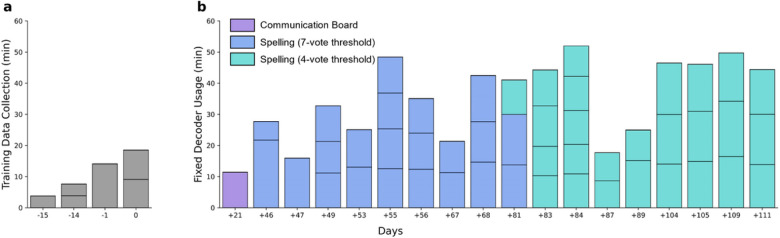
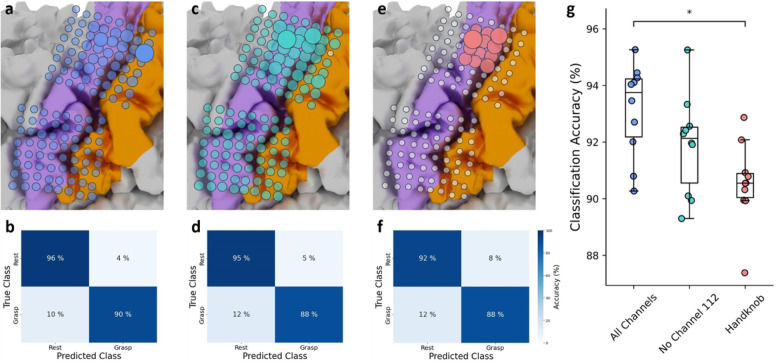
Methods: We sought to test the performance and long-term stability of click-decoding using a chronically implanted high density electrocorticographic (ECoG) BCI with coverage of the sensorimotor cortex in a human clinical trial participant (ClinicalTrials.gov, NCT03567213) with amyotrophic lateral sclerosis (ALS). We trained the participant's click decoder using a small amount of training data (< 44 minutes across four days) collected up to 21 days prior to BCI use, and then tested it over a period of 90 days without any retraining or updating.
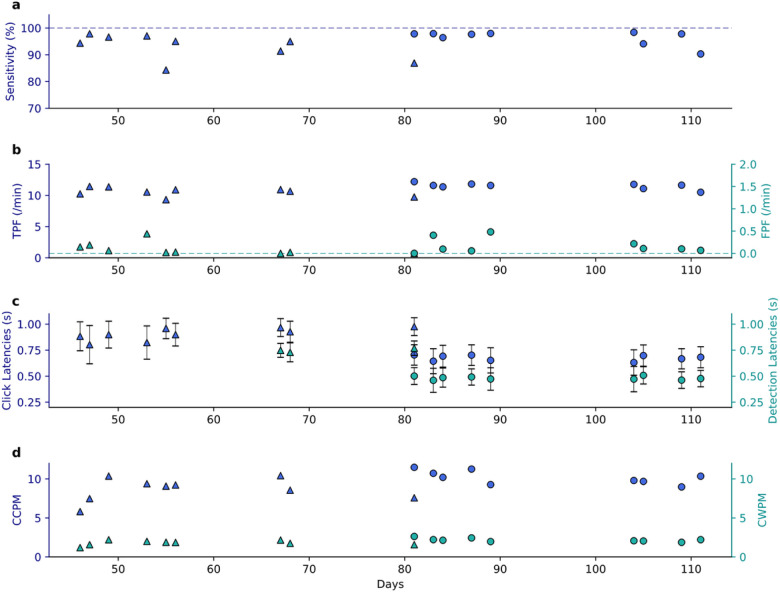
Results: Using this click decoder to navigate a switch-scanning spelling interface, the study participant was able to maintain a median spelling rate of 10.2 characters per min. Though a transient reduction in signal power modulation interrupted testing with this fixed model, a new click decoder achieved comparable performance despite being trained with even less data (< 15 min, within one day).
Conclusion: These results demonstrate that a click decoder can be trained with a small ECoG dataset while retaining robust performance for extended periods, providing functional text-based communication to BCI users.
Conflict of interest statement
Competing interests The authors declare no competing interests.
Figures
References
-
- Silversmith D. B. et al. Plug-and-play control of a brain–computer interface through neural map stabilization. Nat Biotechnol 39, 326–335 (2021). - PubMed
-
- Benabid A. L. et al. An exoskeleton controlled by an epidural wireless brain–machine interface in a tetraplegic patient: a proof-of-concept demonstration. The Lancet Neurology 18, 1112–1122 (2019). - PubMed
Publication types
Associated data
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous
