

Large sensory volumes enable Southern elephant seals to exploit sparse deep-sea prey
- PMID: 37844247
- PMCID: PMC10614626
- DOI: 10.1073/pnas.2307129120
Large sensory volumes enable Southern elephant seals to exploit sparse deep-sea prey
Abstract
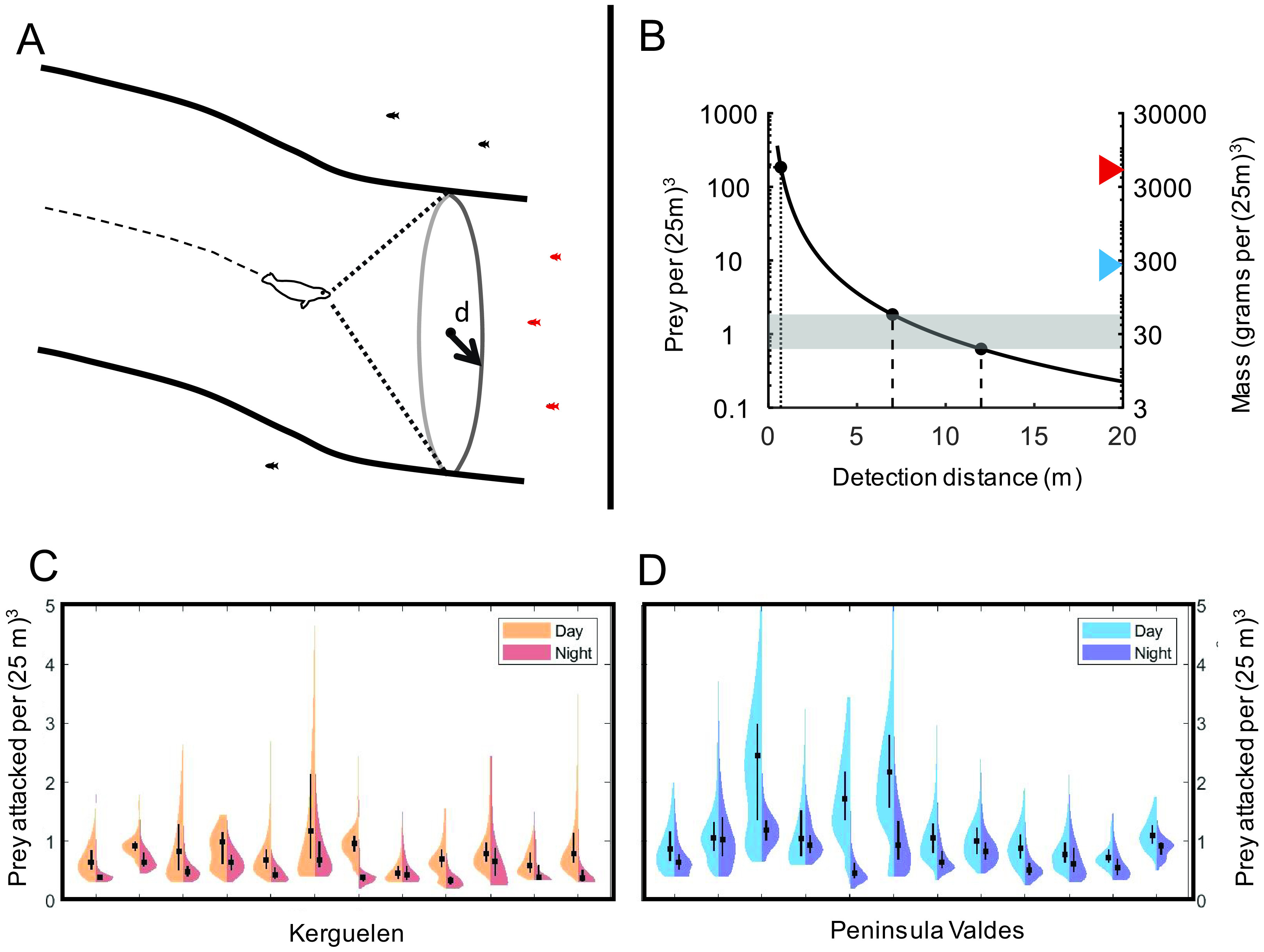
The ability of echolocating toothed whales to detect and classify prey at long ranges enables efficient searching and stalking of sparse prey in these time-limited dives. However, nonecholocating deep-diving seals such as elephant seals appear to have much less sensory advantage over their prey. Both elephant seals and their prey rely on visual and hydrodynamic cues that may be detectable only at short ranges in the deep ocean, leading us to hypothesize that elephant seals must adopt a less efficient reactive mode of hunting that requires high prey densities. To test that hypothesis, we deployed high-resolution sonar and movement tags on 25 females to record simultaneous predator and prey behavior during foraging interactions. We demonstrate that elephant seals have a sensory advantage over their prey that allows them to potentially detect prey 5 to 10 s before striking. The corresponding prey detection ranges of 7 to 17 m enable stealthy approaches and prey-specific capture tactics. In comparison, prey react at a median range of 0.7 m, close to the neck extension range of striking elephant seals. Estimated search swathes of 150 to 900 m2 explain how elephant seals can locate up to 2,000 prey while swimming more than 100 km per day. This efficient search capability allows elephant seals to subsist on prey densities that are consonant with the deep scattering layer resources estimated by hydroacoustic surveys but which are two orders of magnitude lower than the prey densities needed by a reactive hunter.
Keywords: biologging; deep-diving predators; mesopelagic zone; prey detection.
Conflict of interest statement
The authors declare no competing interest.
Figures


References
-
- Proud R., Handegard N. O., Kloser R. J., Cox M. J., Brierley A. S., From siphonophores to deep scattering layers: Uncertainty ranges for the estimation of global mesopelagic fish biomass. ICES J. Mar. Sci. 76, 718–733 (2019).
-
- Jensen F. H., Johnson M., Ladegaard M., Wisniewska D. M., Madsen P. T., Narrow acoustic field of view drives frequency scaling in toothed whale biosonar. Curr. Biol. 28, 3878–3885 (2018). - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
