

Three-dimensional ultrasound matrix imaging
- PMID: 37880210
- PMCID: PMC10600255
- DOI: 10.1038/s41467-023-42338-8
Three-dimensional ultrasound matrix imaging
Abstract
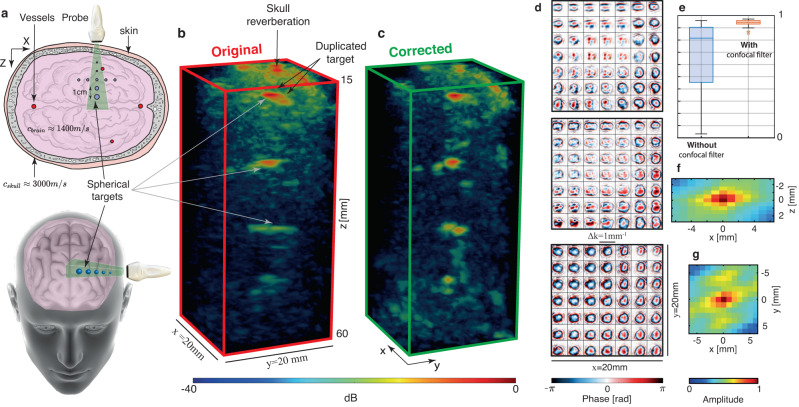
Matrix imaging paves the way towards a next revolution in wave physics. Based on the response matrix recorded between a set of sensors, it enables an optimized compensation of aberration phenomena and multiple scattering events that usually drastically hinder the focusing process in heterogeneous media. Although it gave rise to spectacular results in optical microscopy or seismic imaging, the success of matrix imaging has been so far relatively limited with ultrasonic waves because wave control is generally only performed with a linear array of transducers. In this paper, we extend ultrasound matrix imaging to a 3D geometry. Switching from a 1D to a 2D probe enables a much sharper estimation of the transmission matrix that links each transducer and each medium voxel. Here, we first present an experimental proof of concept on a tissue-mimicking phantom through ex-vivo tissues and then, show the potential of 3D matrix imaging for transcranial applications.
© 2023. Springer Nature Limited.
Conflict of interest statement
A.A., M.F., and W.L. are inventors of a patent related to this work held by CNRS (no. US11346819B2, published May 2022). W.L. had his PhD funded by the SuperSonic Imagine company and is now an employee of this company. All authors declare that they have no other competing interests.
Figures





References
-
- Lambert W, Cobus LA, Couade M, Fink M, Aubry A. Reflection matrix approach for quantitative imaging of scattering media. Phys. Rev. X. 2020;10:021048.
-
- Yilmaz, O. Seismic Data Analysis (Society of Exploration Geophysicists, 2001).
-
- Babcock HW. The possibility of compensating astronomical seeing. Publ. Astron. Soc. Pac. 1953;65:229. doi: 10.1086/126606. - DOI
-
- Roddier, F. ed. Adaptive Optics in Astronomy (Cambridge University Press, 1999).
LinkOut - more resources
Full Text Sources
