

A Bio-Inspired Arched Foot with Individual Toe Joints and Plantar Fascia
- PMID: 37887586
- PMCID: PMC10604005
- DOI: 10.3390/biomimetics8060455
A Bio-Inspired Arched Foot with Individual Toe Joints and Plantar Fascia
Abstract
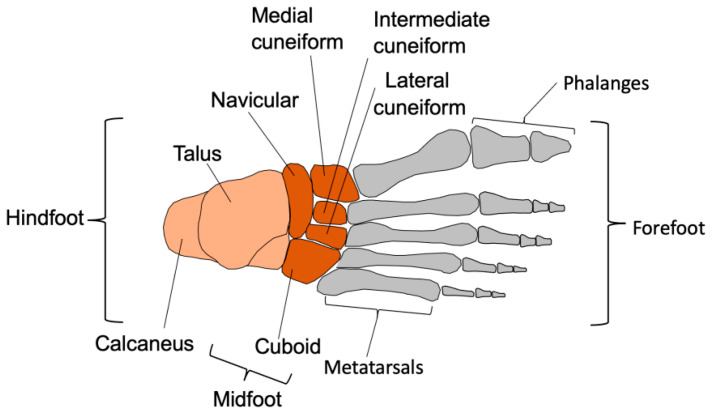
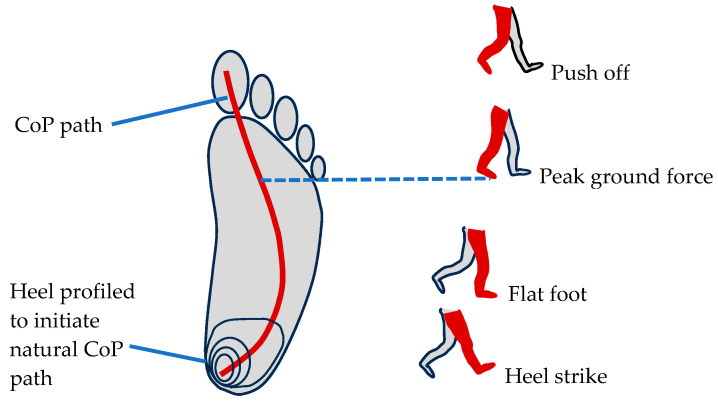
This paper presents the design and testing of an arched foot with several biomimetic features, including five individual MTP (toe) joints, four individual midfoot joints, and plantar fascia. The creation of a triple-arched foot represents a step further in bio-inspired design compared to other published designs. The arched structure creates flexibility that is similar to human feet with a vertical deflection of up to 12 mm. The individual toe joints enable abduction-adduction in the forefoot and therefore a natural pronation motion. Adult female bone data was obtained and converted into a CAD model to accurately identify the location of bones, joints, and arches. An analytical model is presented that gives the relationship between the vertical stiffness and horizontal stiffness of the longitudinal arches and therefore allows the optimization of stiffness elements. Experimental tests have demonstrated a vertical arch stiffness of 76 N/mm which is similar to adult human feet. The range of movement of the foot is similar to human feet with the following values: dorsi-plantarflexion (28°/37°), inversion-eversion (30°/15°), and abduction-adduction (30°/39°). Tests have also demonstrated a three-point contact with the ground that is similar to human feet.
Keywords: MTP joints; arch stiffness; foot prosthetic; plantarflexion; robotic foot; windlass mechanism.
Conflict of interest statement
The authors declare no conflict of interest.
Figures











References
-
- Angin S., Şimşek I.E. Comparative Kinesiology of the Human Body: Normal and Pathological Conditions. Academic Press; Cambridge, MA, USA: 2020. Chapter 23—Ankle and foot complex Salih Angin İlkşan Demirbüken; pp. 411–439.
-
- Grimmer M., Seyfarth A. Neuro-Robotics. Springer; Dordrecht, The Netherlands: 2014. Mimicking Human-Like Leg Function in Prosthetic Limbs; pp. 105–155.
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
