

The use of a Mamdani-type fuzzy model for assessing the performance of a boom stabilization systems in a field sprayer
- PMID: 37903865
- PMCID: PMC10616114
- DOI: 10.1038/s41598-023-46087-y
The use of a Mamdani-type fuzzy model for assessing the performance of a boom stabilization systems in a field sprayer
Abstract
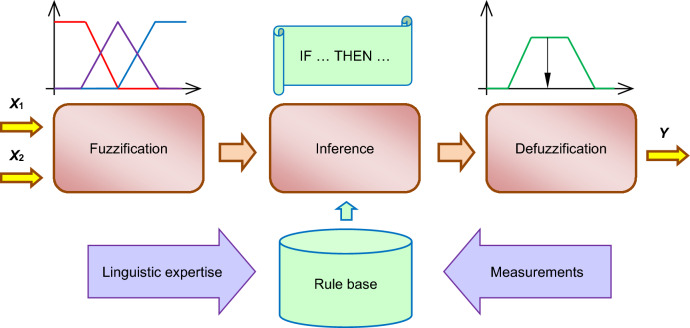
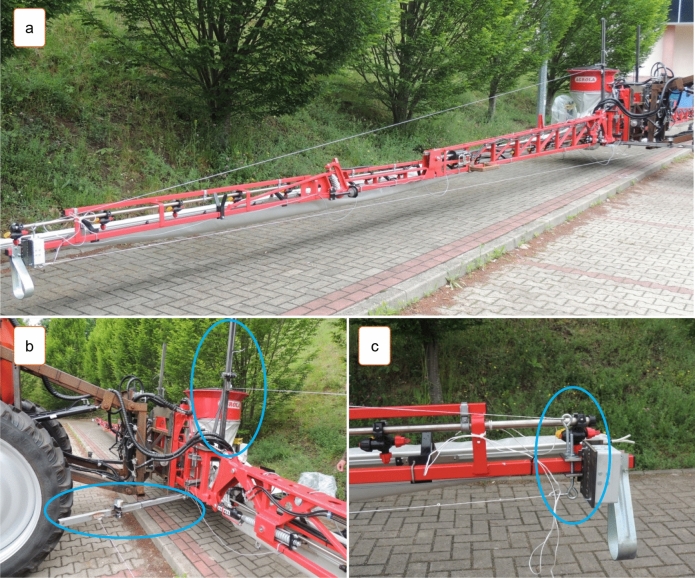
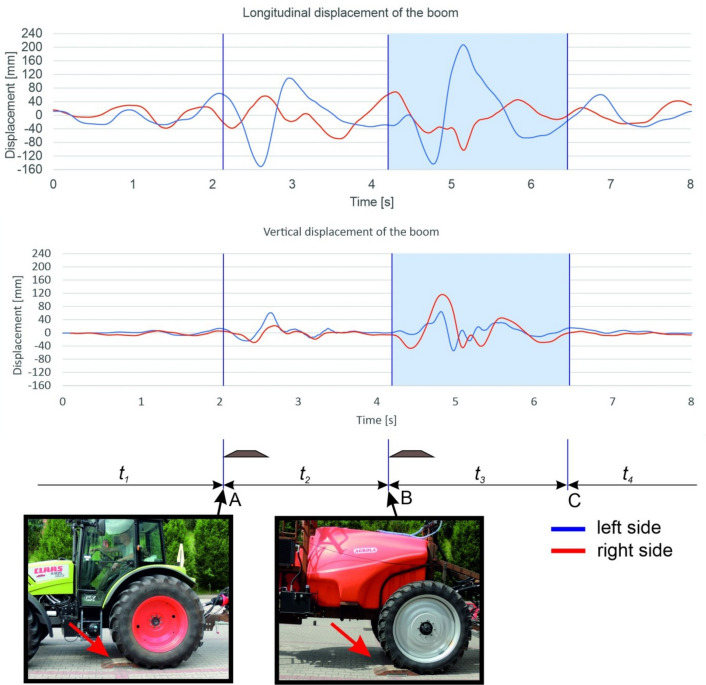
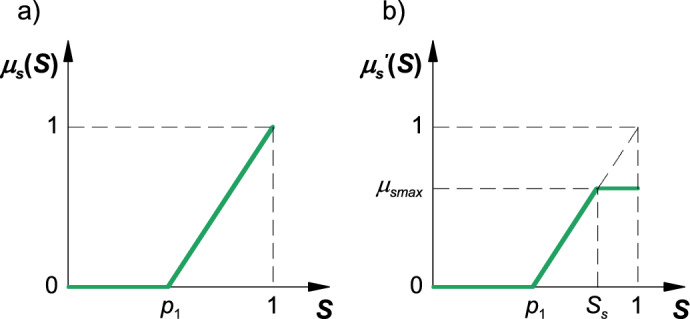
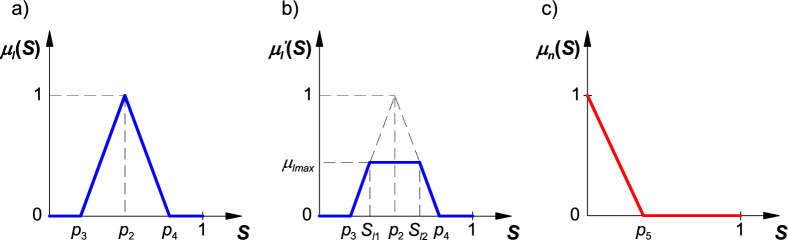
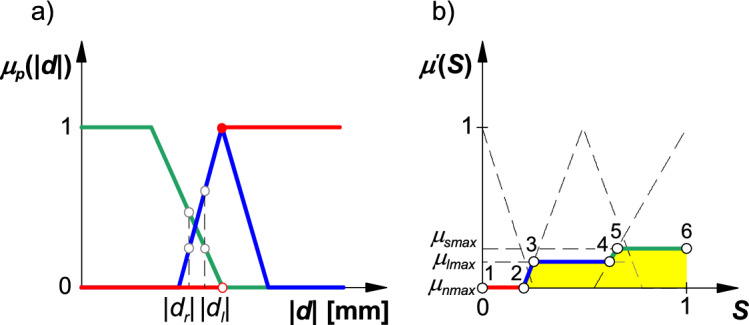
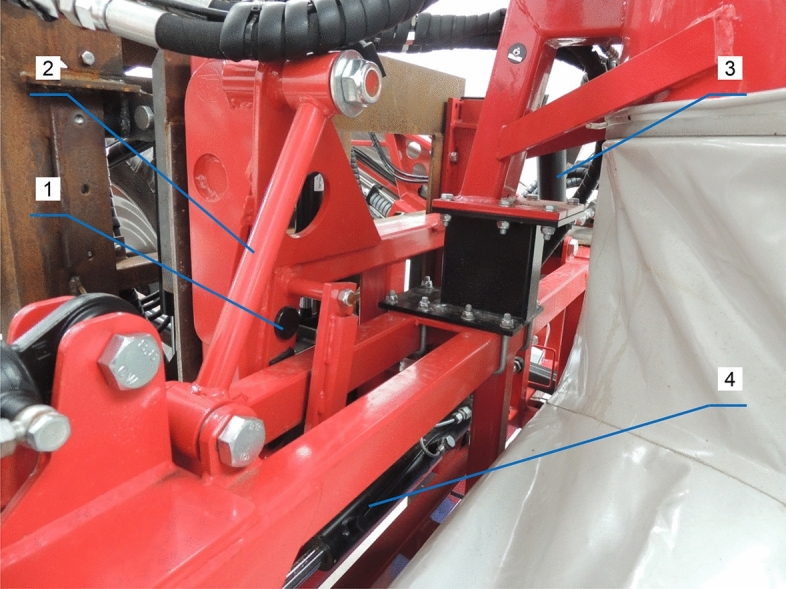
Fuzzy logic models are increasingly used to control simple and complex devices, as well as entire operating systems. In this study, a fuzzy logic model was applied to assess the performance a boom stabilization system in a field sprayer. The model was tested on a field sprayer with a trapezoid system for stabilizing the sprayer boom with a length of 21 m. Measuring cables for registering the displacement of the boom's terminal segments (right and left) in the vertical and horizontal plane were installed on the sprayer. The field sprayer was connected to a tractor. The model was based on two linguistic variables: "absolute displacement of the boom's terminal segments" and "boom stability index". It was assumed that the sprayer boom was stable when the displacement of the boom's terminal segments did not exceed 0.25% of boom length. The study demonstrated that the proposed model can be reliably used to assess boom stability in real time (during field operations). The time required to achieve boom stability was more than 2.5 times shorter in the vertical than in the horizontal plane, which can be attributed mainly to the structure of the stabilization system. The proposed model is universal, and it can be applied to evaluate other boom stabilization systems in field sprayers.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures



References
-
- Dubois D, Prade H. Fundamentals of Fuzzy Sets. Springer; 2000.
-
- Czabanski R, Jezewski M, Leski J. Introduction to fuzzy systems. In: Prokopowicz P, Czerniak J, Mikołajewski D, Apiecionek Ł, Ślȩzak D, editors. Theory and Applications of Ordered Fuzzy Numbers Studies in Fuzziness and Soft Computing. Springer; 2017.
-
- Gu X, Han J, Shen Q, Angelov PP. Autonomous learning for fuzzy systems: a review. Artif. Intell. Rev. 2023;56:7549–7595. doi: 10.1007/s10462-022-10355-6. - DOI
-
- Mamdani EH. Applications of fuzzy algorithms for the control of a simple dynamic plant. Proc. IEE. 1974;121(12):1585–1588. doi: 10.1049/piee.1974.0328. - DOI
-
- Mamdani EH. Advances in the linguistic synthesis of fuzzy controllers. Int. J. Man-Mach. Stud. 1976;8(6):669–678. doi: 10.1016/S0020-7373(76)80028-4. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
