

Reliability and minimal detectable change of stiffness and other mechanical properties of the ankle joint in standing and walking
- PMID: 37988887
- PMCID: PMC10854263
- DOI: 10.1016/j.gaitpost.2023.11.008
Reliability and minimal detectable change of stiffness and other mechanical properties of the ankle joint in standing and walking
Abstract
Background: Ankle joint stiffness and viscosity are fundamental mechanical descriptions that govern the movement of the body and impact an individual's walking ability. Hence, these internal properties of a joint have been increasingly used to evaluate the effects of pathology (e.g., stroke) and in the design and control of robotic and prosthetic devices. However, the reliability of these measurements is currently unclear, which is important for translation to clinical use.
Research question: Can we reliably measure the mechanical impedance parameters of the ankle while standing and walking?
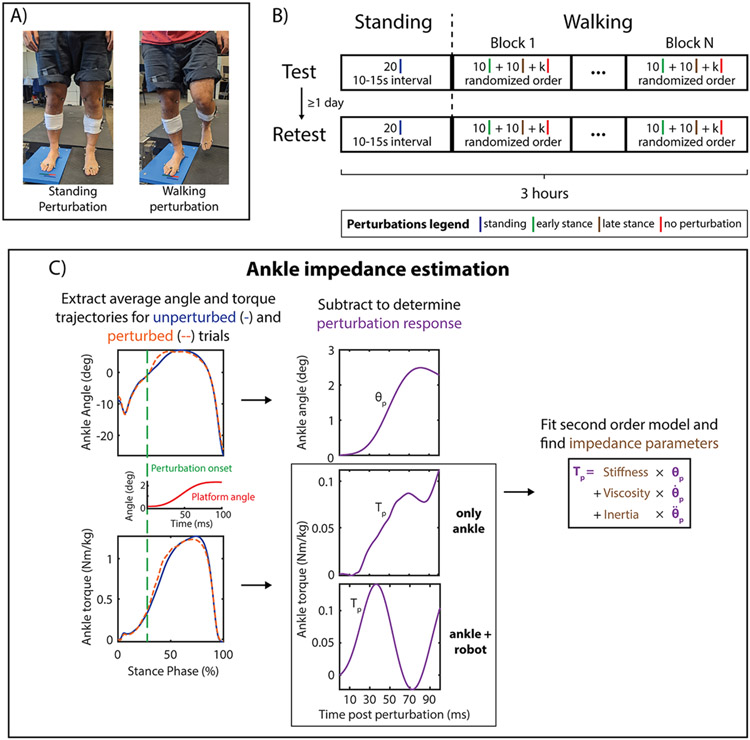
Methods: Eighteen able-bodied individuals volunteered to be tested on two different days separated by at least 24 h. Participants received several small random ankle dorsiflexion perturbations while standing and during the stance phase of walking using a custom-designed robotic platform. Three-dimensional motion capture cameras and a 6-component force plate were used to quantify ankle joint motions and torque responses during normal and perturbed conditions. Ankle mechanical impedance was quantified by computing participant-specific ensemble averages of changes in ankle angle and torque due to perturbation and fitting a second-order parametric model consisting of stiffness, viscosity, and inertia. The test-retest reliability of each parameter was assessed using intraclass correlation coefficients (ICCs). We also computed the minimal detectable change (MDC) for each impedance parameter to establish the smallest amount of change that falls outside the measurement error of the instrument.
Results: In standing, the reliability of stiffness, viscosity, and inertia was good to excellent (ICCs=0.67-0.91). During walking, the reliability of stiffness and viscosity was good to excellent (ICCs=0.74-0.84) while that of inertia was fair to good (ICCs=0.47-0.68). The MDC for a single subject ranged from 20%- 65% of the measurement mean but was higher (>100%) for inertia during walking.
Significance: Results indicate that dynamic measures of ankle joint impedance were generally reliable and could serve as an adjunct clinical tool for evaluating gait impairments.
Keywords: Biomechanics; Joint stiffness; Neural control; Rehabilitation; Robot; Stroke.
Copyright © 2023 Elsevier B.V. All rights reserved.
Conflict of interest statement
Declaration of Competing Interest All authors declare that they have no conflict of interest.
Figures

References
-
- Epro G, McCrum C, Mierau A, Leyendecker M, Bruggemann GP, Karamanidis K. Effects of triceps surae muscle strength and tendon stiffness on the reactive dynamic stability and adaptability of older female adults during perturbed walking. J Appl Physiol (1985). 2018;124:1541–9. - PubMed
-
- Ho CY, Bendrups AP. Ankle reflex stiffness during unperceived perturbation of standing in elderly subjects. J Gerontol A Biol Sci Med Sci. 2002;57:B344–50. - PubMed
-
- Lee H, Ho P, Rastgaar M, Krebs HI, Hogan N. Multivariable Static Ankle Mechanical Impedance With Active Muscles. IEEE Trans Neural Syst Rehabil Eng. 2014;22:44–52. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
