

Exploring the dynamics of intentional sensorimotor desynchronization using phasing performance in music
- PMID: 38022969
- PMCID: PMC10653329
- DOI: 10.3389/fpsyg.2023.1207646
Exploring the dynamics of intentional sensorimotor desynchronization using phasing performance in music
Abstract
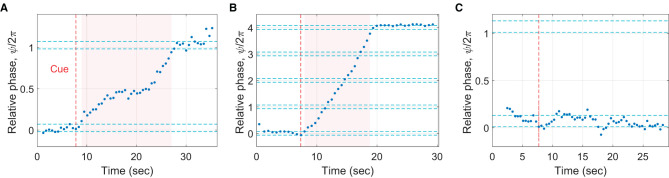
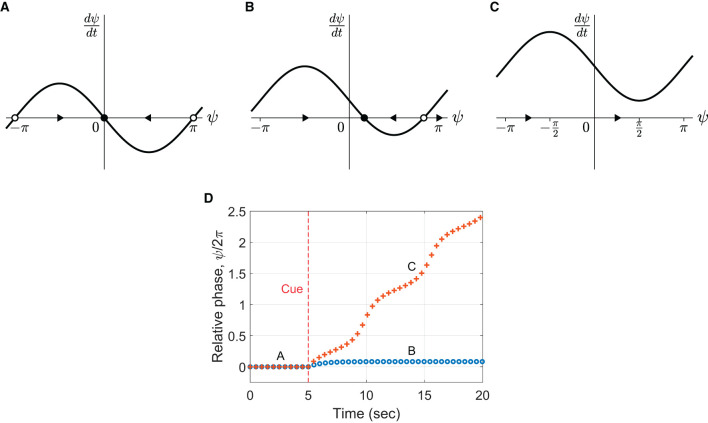
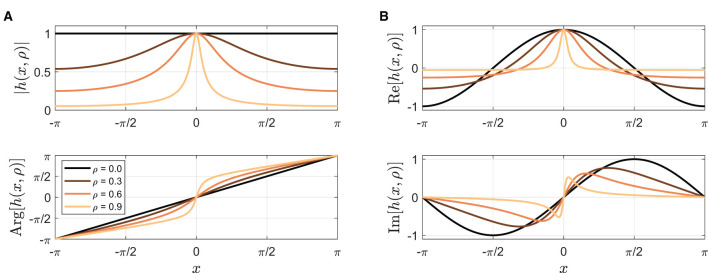
Humans tend to synchronize spontaneously to rhythmic stimuli or with other humans, but they can also desynchronize intentionally in certain situations. In this study, we investigate the dynamics of intentional sensorimotor desynchronization using phasing performance in music as an experimental paradigm. Phasing is a compositional technique in modern music that requires musicians to desynchronize from each other in a controlled manner. A previous case study found systematic nonlinear trajectories in the phasing performance between two expert musicians, which were explained by coordination dynamics arising from the interaction between the intrinsic tendency of synchronization and the intention of desynchronization. A recent exploratory study further examined the dynamics of phasing performance using a simplified task of phasing against a metronome. Here we present a further analysis and modeling of the data from the exploratory study, focusing on the various types of phasing behavior found in non-expert participants. Participants were instructed to perform one phasing lap, and individual trials were classified as successful (1 lap), unsuccessful (> 1 laps), or incomplete (0 lap) based on the number of laps made. It was found that successful phasing required a gradual increment of relative phase and that different types of failure (unsuccessful vs. incomplete) were prevalent at slow vs. fast metronome tempi. The results are explained from a dynamical systems perspective, and a dynamical model of phasing performance is proposed which captures the interaction of intrinsic dynamics and intentional control in an adaptive-frequency oscillator coupled to a periodic external stimulus. It is shown that the model can replicate the multiple types of phasing behavior as well as the effect of tempo observed in the human experiment. This study provides further evidence that phasing performance is governed by the nonlinear dynamics of rhythmic coordination. It also demonstrates that the musical technique of phasing provides a unique experimental paradigm for investigating human rhythmic behavior.
Keywords: coordination dynamics; dynamical systems; music performance; oscillator model; phasing; rhythmic coordination.
Copyright © 2023 Kim.
Conflict of interest statement
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures










Similar articles
-
Multidimensional recurrence quantification analysis of human-metronome phasing.PLoS One. 2023 Feb 23;18(2):e0279987. doi: 10.1371/journal.pone.0279987. eCollection 2023. PLoS One. 2023. PMID: 36821591 Free PMC article.
-
Delayed feedback embedded in perception-action coordination cycles results in anticipation behavior during synchronized rhythmic action: A dynamical systems approach.PLoS Comput Biol. 2019 Oct 31;15(10):e1007371. doi: 10.1371/journal.pcbi.1007371. eCollection 2019 Oct. PLoS Comput Biol. 2019. PMID: 31671096 Free PMC article.
-
Hebbian learning with elasticity explains how the spontaneous motor tempo affects music performance synchronization.PLoS Comput Biol. 2023 Jun 7;19(6):e1011154. doi: 10.1371/journal.pcbi.1011154. eCollection 2023 Jun. PLoS Comput Biol. 2023. PMID: 37285380 Free PMC article. Review.
-
Temporal coordination and adaptation to rate change in music performance.J Exp Psychol Hum Percept Perform. 2011 Aug;37(4):1292-309. doi: 10.1037/a0023102. J Exp Psychol Hum Percept Perform. 2011. PMID: 21553990
-
Sensorimotor synchronization: a review of recent research (2006-2012).Psychon Bull Rev. 2013 Jun;20(3):403-52. doi: 10.3758/s13423-012-0371-2. Psychon Bull Rev. 2013. PMID: 23397235 Review.
References
-
- Beek P. J., Peper C. L. E., Daffertshofer A. (2000). “Timekeepers versus nonlinear oscillators: how the approaches differ,” in Rhythm Perceptions and Productions, eds. Desain P., Windsor L.. Lisse, Netherlands: Swets & Zeitlinger, 9–33.
-
- Cohn R. (1992). Transpositional combination of beat-class sets in Steve Reich's phase-shifting music. Persp. New Music 30, 146. 10.2307/3090631 - DOI
LinkOut - more resources
Full Text Sources
Research Materials