

A robophysical model of spacetime dynamics
- PMID: 38062136
- PMCID: PMC10703937
- DOI: 10.1038/s41598-023-46718-4
A robophysical model of spacetime dynamics
Abstract
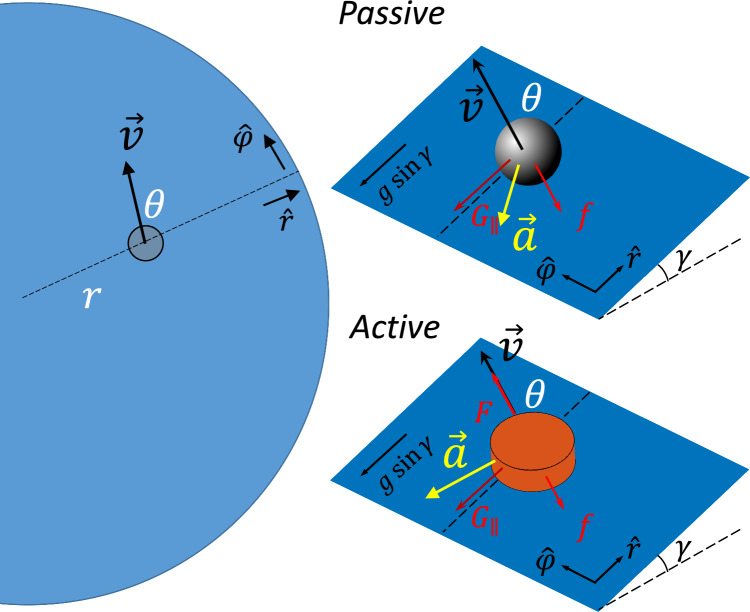
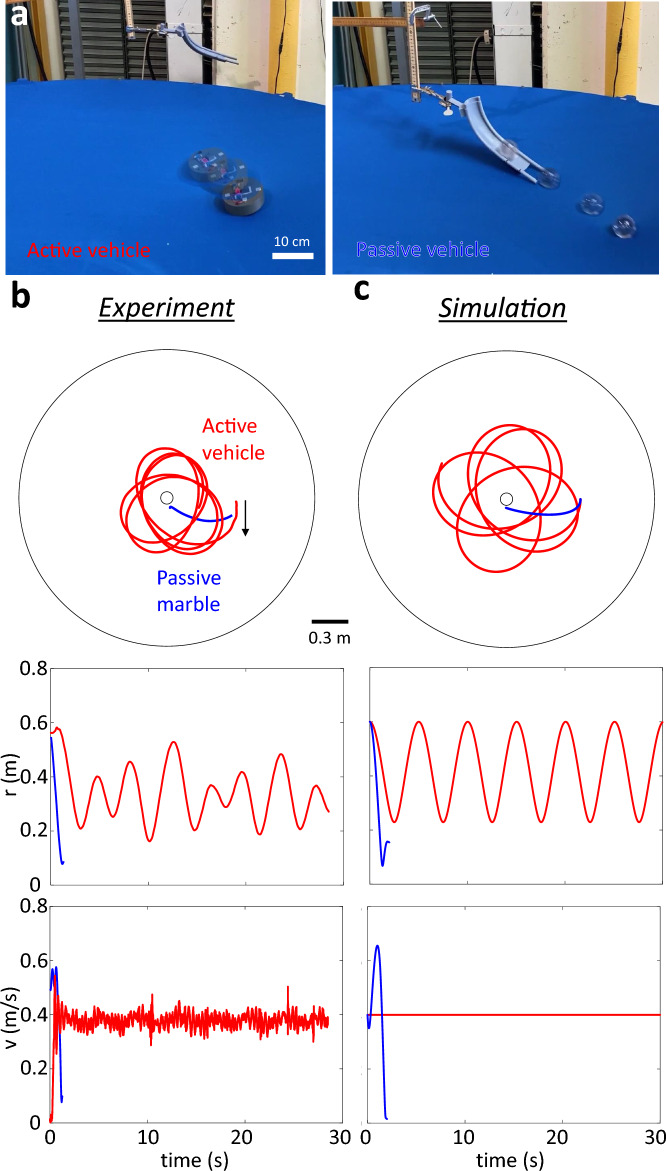
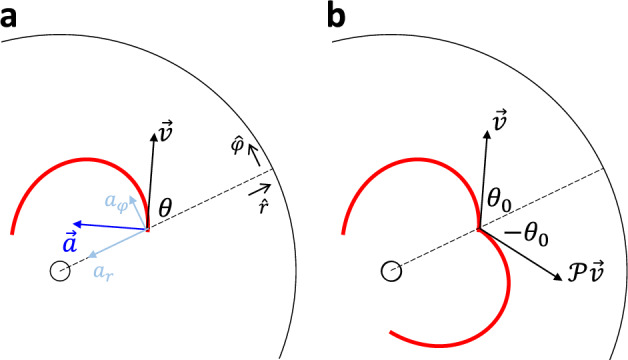
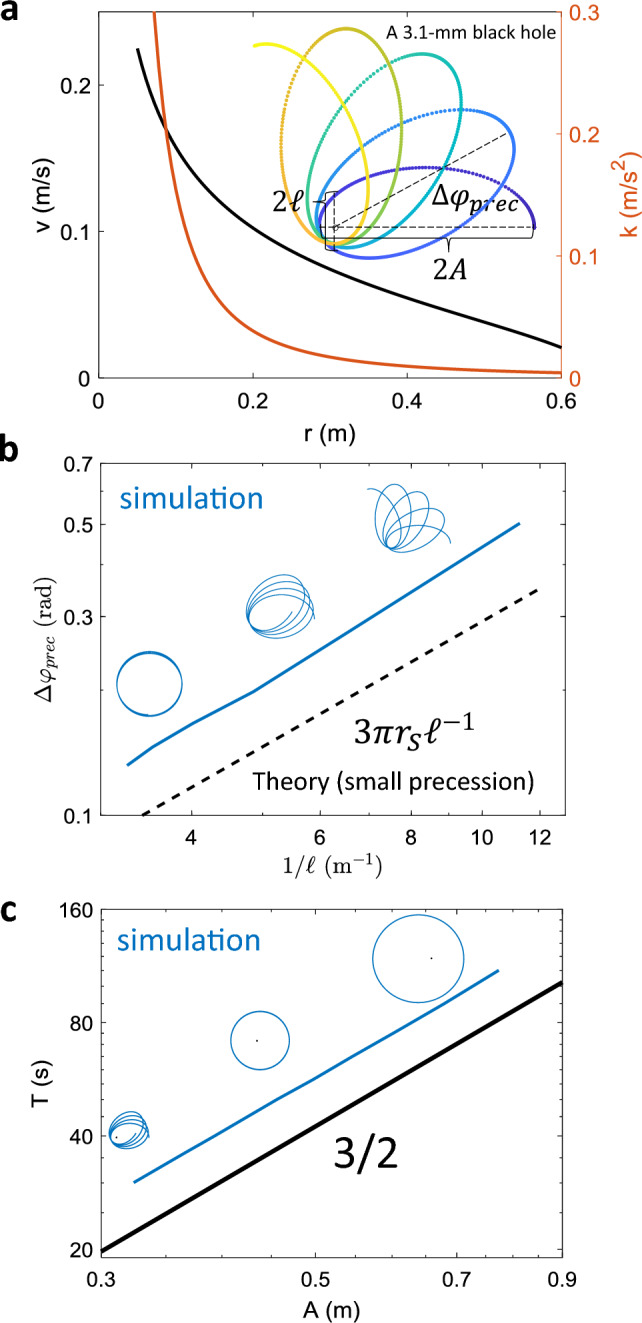
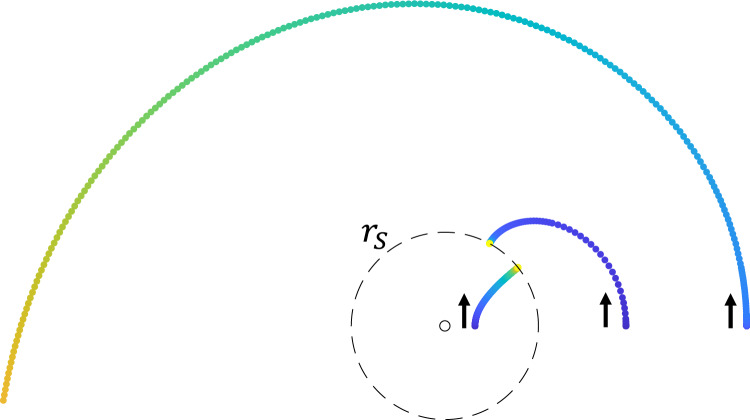
Systems consisting of spheres rolling on elastic membranes have been used to introduce a core conceptual idea of General Relativity: how curvature guides the movement of matter. However, such schemes cannot accurately represent relativistic dynamics in the laboratory because of the dominance of dissipation and external gravitational fields. Here we demonstrate that an "active" object (a wheeled robot), which moves in a straight line on level ground and can alter its speed depending on the curvature of the deformable terrain it moves on, can exactly capture dynamics in curved relativistic spacetimes. Via the systematic study of the robot's dynamics in the radial and orbital directions, we develop a mapping of the emergent trajectories of a wheeled vehicle on a spandex membrane to the motion in a curved spacetime. Our mapping demonstrates how the driven robot's dynamics mix space and time in a metric, and shows how active particles do not necessarily follow geodesics in the real space but instead follow geodesics in a fiducial spacetime. The mapping further reveals how parameters such as the membrane elasticity and instantaneous speed allow the programming of a desired spacetime, such as the Schwarzschild metric near a non-rotating blackhole. Our mapping and framework facilitate creation of a robophysical analog to a general relativistic system in the laboratory at low cost that can provide insights into active matter in deformable environments and robot exploration in complex landscapes.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures


References
-
- Middleton CA, Weller D. Elliptical-like orbits on a warped spandex fabric: A theoretical/experimental undergraduate research project. Am. J. Phys. 2016;84(4):284–292. doi: 10.1119/1.4940246. - DOI
-
- White GD. On trajectories of rolling marbles in cones and other funnels. Am. J. Phys. 2013;81(12):890–898. doi: 10.1119/1.4823475. - DOI
-
- White GD, Walker M. The shape of “the spandex” and orbits upon its surface. Am. J. Phys. 2002;70(1):48–52. doi: 10.1119/1.1412645. - DOI
-
- Aguilar J, Zhang T, Qian F, Kingsbury M, McInroe B, Mazouchova N, Li C, Maladen R, Gong C, Travers M, et al. A review on locomotion robophysics: The study of movement at the intersection of robotics, soft matter and dynamical systems. Rep. Prog. Phys. 2016;79(11):110001. doi: 10.1088/0034-4885/79/11/110001. - DOI - PubMed
-
- Aydin, Y. O., Rieser, J. M., Hubicki, C. M., Savoie, W. & Goldman, D. I. Physics approaches to natural locomotion: Every robot is an experiment. In: Robotic Systems and Autonomous Platforms 109–127 (Elsevier, 2019).
Grants and funding
LinkOut - more resources
Full Text Sources
