

Band Engineering versus Catalysis: Enhancing the Self-Propulsion of Light-Powered MXene-Derived Metal-TiO2 Micromotors To Degrade Polymer Chains
- PMID: 38134036
- PMCID: PMC10788834
- DOI: 10.1021/acsami.3c13470
Band Engineering versus Catalysis: Enhancing the Self-Propulsion of Light-Powered MXene-Derived Metal-TiO2 Micromotors To Degrade Polymer Chains
Abstract
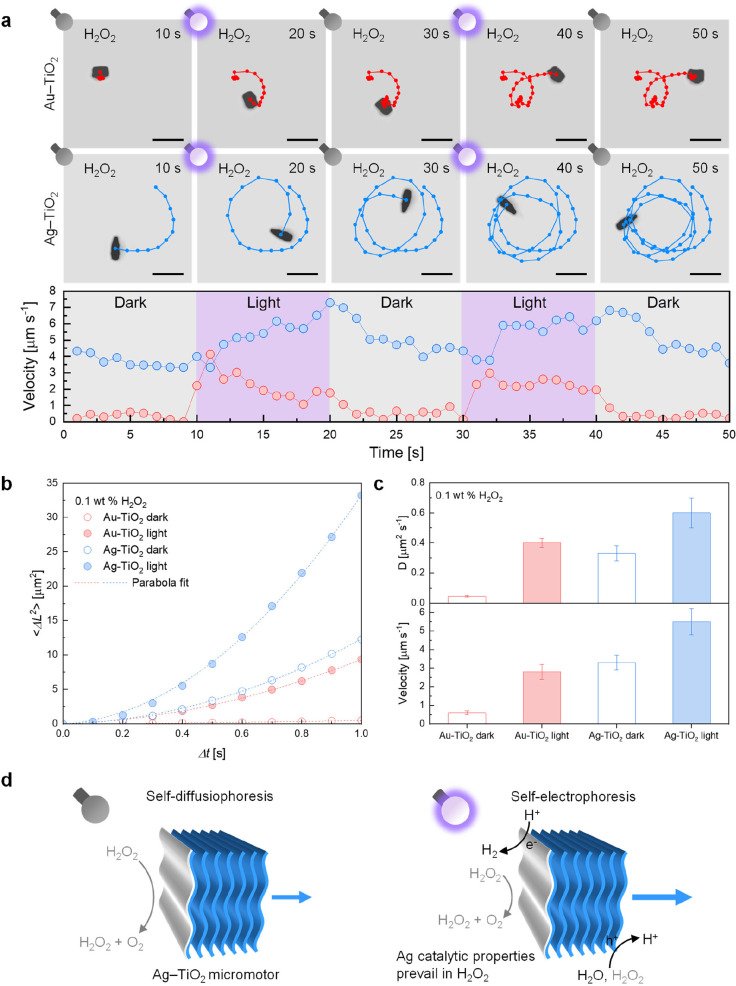
Light-powered micro- and nanomotors based on photocatalytic semiconductors convert light into mechanical energy, allowing self-propulsion and various functions. Despite recent progress, the ongoing quest to enhance their speed remains crucial, as it holds the potential for further accelerating mass transfer-limited chemical reactions and physical processes. This study focuses on multilayered MXene-derived metal-TiO2 micromotors with different metal materials to investigate the impact of electronic properties of the metal-semiconductor junction, such as energy band bending and built-in electric field, on self-propulsion. By asymmetrically depositing Au or Ag layers on thermally annealed Ti3C2Tx MXene microparticles using sputtering, Janus structures are formed with Schottky junctions at the metal-semiconductor interface. Under UV light irradiation, Au-TiO2 micromotors show higher self-propulsion velocities due to the stronger built-in electric field, enabling efficient photogenerated charge carrier separation within the semiconductor and higher hole accumulation beneath the Au layer. On the contrary, in 0.1 wt % H2O2, Ag-TiO2 micromotors reach higher velocities both in the presence and absence of UV light irradiation, owing to the superior catalytic properties of Ag in H2O2 decomposition. Due to the widespread use of plastics and polymers, and the consequent occurrence of nano/microplastics and polymeric waste in water, Au-TiO2 micromotors were applied in water remediation to break down polyethylene glycol (PEG) chains, which were used as a model for polymeric pollutants in water. These findings reveal the interplay between electronic properties and catalytic activity in metal-semiconductor junctions, offering insights into the future design of powerful light-driven micro- and nanomotors with promising implications for water treatment and photocatalysis applications.
Keywords: MXenes; Schottky junctions; microrobots; photocatalysis; plastics; polymers; titanium dioxide; water purification.
Conflict of interest statement
The authors declare no competing financial interest.
Figures





References
-
- Urso M.; Pumera M. Micro- and Nanorobots Meet DNA. Adv. Funct. Mater. 2022, 32 (37), 220071110.1002/adfm.202200711. - DOI
LinkOut - more resources
Full Text Sources
