

First-in-human demonstration of floating EMG sensors and stimulators wirelessly powered and operated by volume conduction
- PMID: 38172975
- PMCID: PMC10765656
- DOI: 10.1186/s12984-023-01295-5
First-in-human demonstration of floating EMG sensors and stimulators wirelessly powered and operated by volume conduction
Abstract
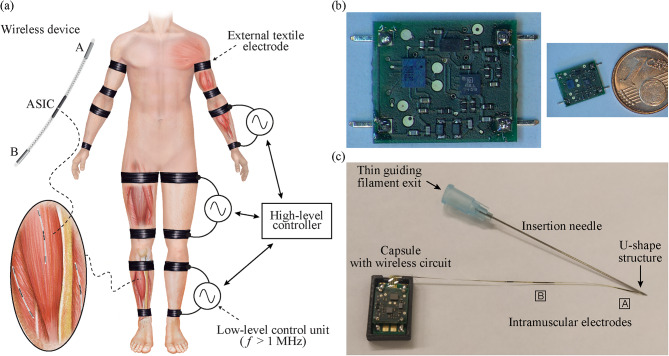
Background: Recently we reported the design and evaluation of floating semi-implantable devices that receive power from and bidirectionally communicate with an external system using coupling by volume conduction. The approach, of which the semi-implantable devices are proof-of-concept prototypes, may overcome some limitations presented by existing neuroprostheses, especially those related to implant size and deployment, as the implants avoid bulky components and can be developed as threadlike devices. Here, it is reported the first-in-human acute demonstration of these devices for electromyography (EMG) sensing and electrical stimulation.
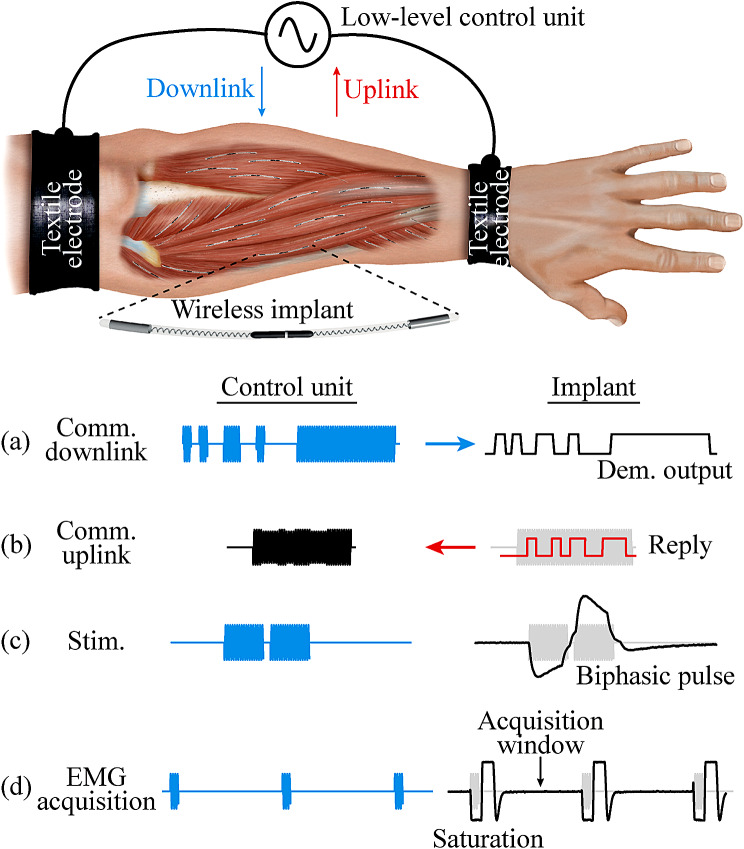
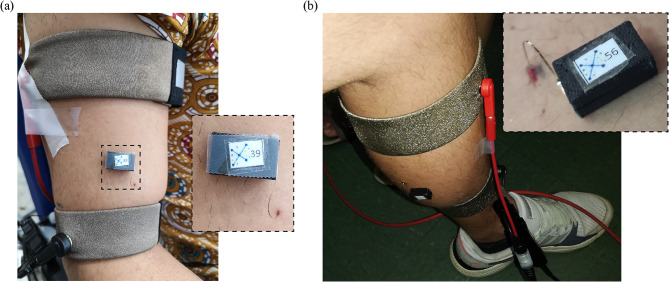
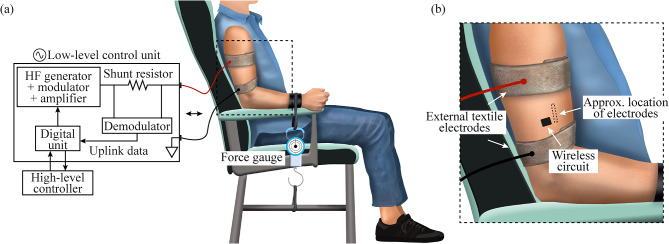
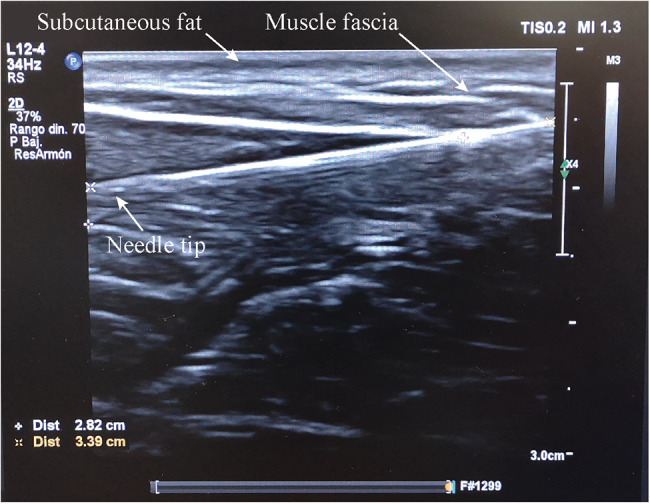
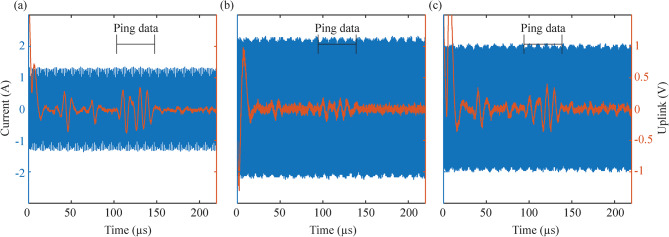
Methods: A proof-of-concept device, consisting of implantable thin-film electrodes and a nonimplantable miniature electronic circuit connected to them, was deployed in the upper or lower limb of six healthy participants. Two external electrodes were strapped around the limb and were connected to the external system which delivered high frequency current bursts. Within these bursts, 13 commands were modulated to communicate with the implant.
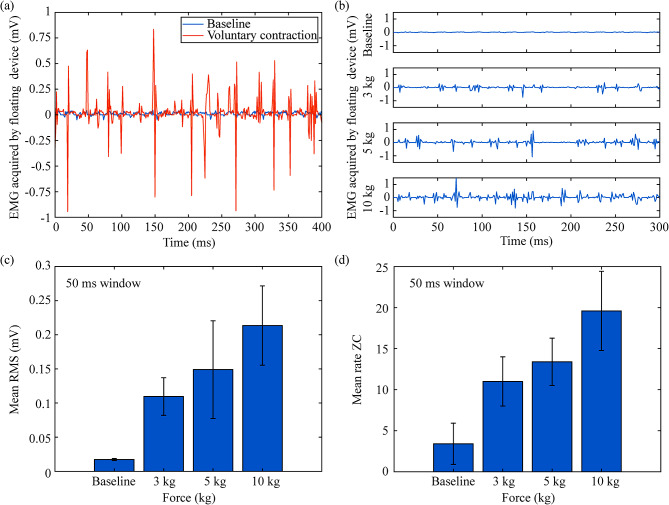
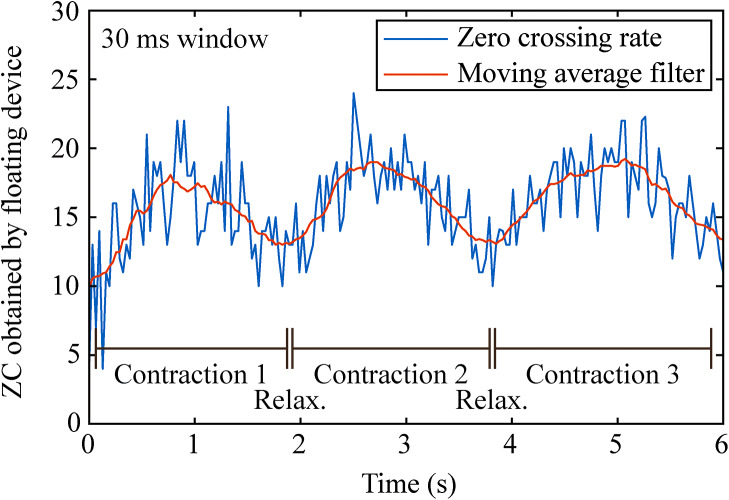
Results: Four devices were deployed in the biceps brachii and the gastrocnemius medialis muscles, and the external system was able to power and communicate with them. Limitations regarding insertion and communication speed are reported. Sensing and stimulation parameters were configured from the external system. In one participant, electrical stimulation and EMG acquisition assays were performed, demonstrating the feasibility of the approach to power and communicate with the floating device.
Conclusions: This is the first-in-human demonstration of EMG sensors and electrical stimulators powered and operated by volume conduction. These proof-of-concept devices can be miniaturized using current microelectronic technologies, enabling fully implantable networked neuroprosthetics.
Keywords: AIMDs; Bidirectional communications; Electrical stimulation; Electromyography; Human validation.; Neuroprostheses; Semi-implantable devices; Sensor; Volume conduction; Wireless power transfer.
© 2023. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Pascual-Valdunciel A, Gonzalez-Sanchez M, Muceli S, Adan-Barrientos B, Escobar-Segura V, Perez-Sanchez JR, et al. Intramuscular stimulation of muscle afferents attains prolonged tremor reduction in essential tremor patients. IEEE Trans Biomed Eng. 2020;68(6):1768–76. doi: 10.1109/TBME.2020.3015572. - DOI - PubMed
Publication types
MeSH terms
Grants and funding
- 779982/European Union's Horizon 2020 research and innovation programme
- NEURO-AGINGl+ (PTI-NEURO-AGING+)/CSIC Interdisciplinary Thematic Platform (PTI+)
- MCIN/AEI/10.13039/501100011033/Ministerio de Ciencia e Innovación
- IJC2020-044467-I/European Union NextGenerationEU/PRTR
- ICREA Academia/Institució Catalana de Recerca i Estudis Avançats
LinkOut - more resources
Full Text Sources
