

The LIBRA NeuroLimb: Hybrid Real-Time Control and Mechatronic Design for Affordable Prosthetics in Developing Regions
- PMID: 38202932
- PMCID: PMC10780857
- DOI: 10.3390/s24010070
The LIBRA NeuroLimb: Hybrid Real-Time Control and Mechatronic Design for Affordable Prosthetics in Developing Regions
Abstract
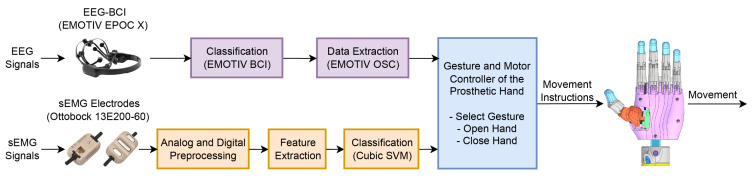
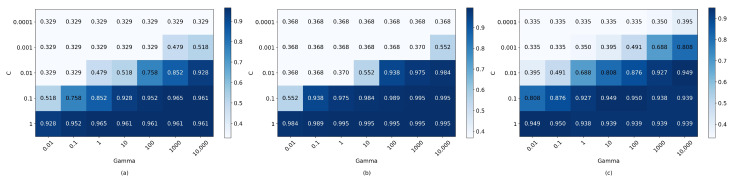
Globally, 2.5% of upper limb amputations are transhumeral, and both mechanical and electronic prosthetics are being developed for individuals with this condition. Mechanics often require compensatory movements that can lead to awkward gestures. Electronic types are mainly controlled by superficial electromyography (sEMG). However, in proximal amputations, the residual limb is utilized less frequently in daily activities. Muscle shortening increases with time and results in weakened sEMG readings. Therefore, sEMG-controlled models exhibit a low success rate in executing gestures. The LIBRA NeuroLimb prosthesis is introduced to address this problem. It features three active and four passive degrees of freedom (DOF), offers up to 8 h of operation, and employs a hybrid control system that combines sEMG and electroencephalography (EEG) signal classification. The sEMG and EEG classification models achieve up to 99% and 76% accuracy, respectively, enabling precise real-time control. The prosthesis can perform a grip within as little as 0.3 s, exerting up to 21.26 N of pinch force. Training and validation sessions were conducted with two volunteers. Assessed with the "AM-ULA" test, scores of 222 and 144 demonstrated the prosthesis's potential to improve the user's ability to perform daily activities. Future work will prioritize enhancing the mechanical strength, increasing active DOF, and refining real-world usability.
Keywords: brain–computer interface; machine learning; myoelectric control; pattern recognition; sensor fusion; transhumeral prosthesis.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




















References
-
- World Health Organization. United Nations Children’s Fund . Global Report on Assistive Technology. World Health Organization; Genève, Switzerland: 2022.
-
- Holland A.C., Hummel C. Informalities: An Index Approach to Informal Work and Its Consequences. Lat. Am. Politics Soc. 2022;64:1–20. doi: 10.1017/lap.2022.3. - DOI
-
- Diaz Dumont J.R., Suarez Mansilla S.L., Santiago Martinez R.N., Bizarro Huaman E.M. Accidentes laborales en el Perú: Análisis de la realidad a partir de datos estadísticos. Rev. Venez. Gerenc. 2020;25:312–329.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
