

Ensuring communication redundancy and establishing a telementoring system for robotic telesurgery using multiple communication lines
- PMID: 38206522
- PMCID: PMC10784335
- DOI: 10.1007/s11701-023-01792-8
Ensuring communication redundancy and establishing a telementoring system for robotic telesurgery using multiple communication lines
Abstract
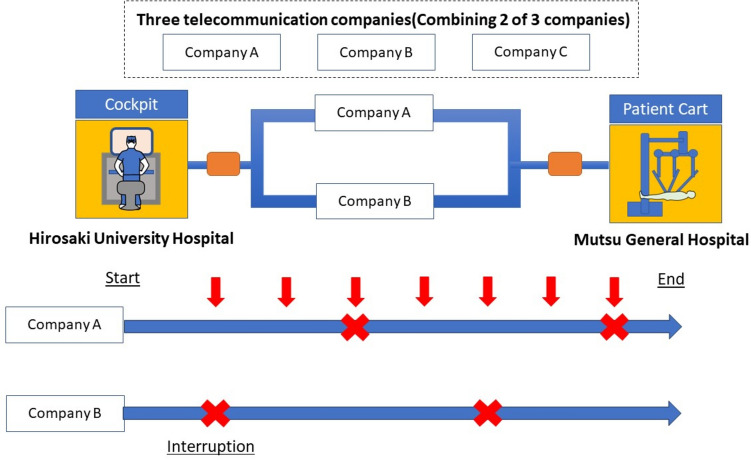
Assuring communication redundancy during the interruption and establishing appropriate teaching environments for local surgeons are essential to making robotic telesurgery mainstream. This study analyzes robotic telesurgery with telementoring using standard domestic telecommunication carriers. Can multiple carriers guarantee redundancy with interruptions? Three commercial optical fiber lines connected Hirosaki University and Mutsu General Hospitals, 150 km apart. Using Riverfield, Inc. equipment, Hirosaki had a cockpit, while both Mutsu used both a cockpit and a surgeon's console. Experts provided telementoring evaluating 14 trainees, using objective indices for operation time and errors. Subjective questionnaires addressed image quality and surgical operability. Eighteen participants performed telesurgery using combined lines from two/three telecommunication carriers. Manipulation: over 30 min, lines were cut and restored every three minutes per task. Subjects were to press a switch when noticing image quality or operability changes. Mean time to task completion was 1510 (1186-1960) seconds: local surgeons alone and 1600 (1152-2296) seconds for those under remote instructor supervision, including expert intervention time. There was no significant difference (p = 0.86). The mean error count was 0.92 (0-3) for local surgeons and 0.42 (0-2) with remote instructors. Image quality and operability questionnaires found no significant differences. Results communication companies A, B, and C: the A/B combination incurred 0.17 (0-1) presses of the environment change switch, B/C had 0, and C/A received 0.67 (0-3), showing no significant difference among provider combinations. Combining multiple communication lines guarantees communication redundancy and enables robotic telementoring with enhanced communication security.
Keywords: Multiple communication lines; Robotic telesurgery; Telementoring system.
© 2024. The Author(s).
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Similar articles
-
Real-time telementoring with 3D drawing annotation in robotic surgery.Surg Endosc. 2023 Dec;37(12):9676-9683. doi: 10.1007/s00464-023-10521-z. Epub 2023 Nov 7. Surg Endosc. 2023. PMID: 37935920
-
Construction of redundant communications to enhance safety against communication interruptions during robotic remote surgery.Sci Rep. 2023 Jul 4;13(1):10831. doi: 10.1038/s41598-023-37730-9. Sci Rep. 2023. PMID: 37402741 Free PMC article.
-
Reappraisal of telesurgery in the era of high-speed, high-bandwidth, secure communications: Evaluation of surgical performance in local and remote environments.Ann Gastroenterol Surg. 2022 Aug 12;7(1):167-174. doi: 10.1002/ags3.12611. eCollection 2023 Jan. Ann Gastroenterol Surg. 2022. PMID: 36643359 Free PMC article.
-
Robotic surgery, telerobotic surgery, telepresence, and telementoring. Review of early clinical results.Surg Endosc. 2002 Oct;16(10):1389-402. doi: 10.1007/s00464-001-8283-7. Epub 2002 Jul 29. Surg Endosc. 2002. PMID: 12140630 Review.
-
Telementoring and Telesurgery for Minimally Invasive Procedures.J Urol. 2018 Feb;199(2):355-369. doi: 10.1016/j.juro.2017.06.082. Epub 2017 Jun 26. J Urol. 2018. PMID: 28655529 Review.
Cited by
-
Best practices in telesurgery: framework and recommendations from the society of robotic surgery (SRS) for safe and effective implementation.J Robot Surg. 2025 Jul 11;19(1):370. doi: 10.1007/s11701-025-02523-x. J Robot Surg. 2025. PMID: 40643832 Review.
-
Clinical practice guidelines for telesurgery 2022 : Committee for the promotion of remote surgery implementation, Japan Surgical Society.Surg Today. 2024 Aug;54(8):817-828. doi: 10.1007/s00595-024-02863-5. Epub 2024 Jun 3. Surg Today. 2024. PMID: 38829562 Free PMC article.
-
Telesurgery unleashed: redefining surgical presence in the age of intelligent robotics.J Robot Surg. 2025 Aug 6;19(1):455. doi: 10.1007/s11701-025-02634-5. J Robot Surg. 2025. PMID: 40768173 No abstract available.
References
MeSH terms
LinkOut - more resources
Full Text Sources
