

Decoding hand and wrist movement intention from chronic stroke survivors with hemiparesis using a user-friendly, wearable EMG-based neural interface
- PMID: 38218901
- PMCID: PMC10787968
- DOI: 10.1186/s12984-023-01301-w
Decoding hand and wrist movement intention from chronic stroke survivors with hemiparesis using a user-friendly, wearable EMG-based neural interface
Abstract
Objective: Seventy-five percent of stroke survivors, caregivers, and health care professionals (HCP) believe current therapy practices are insufficient, specifically calling out the upper extremity as an area where innovation is needed to develop highly usable prosthetics/orthotics for the stroke population. A promising method for controlling upper extremity technologies is to infer movement intention non-invasively from surface electromyography (EMG). However, existing technologies are often limited to research settings and struggle to meet user needs.
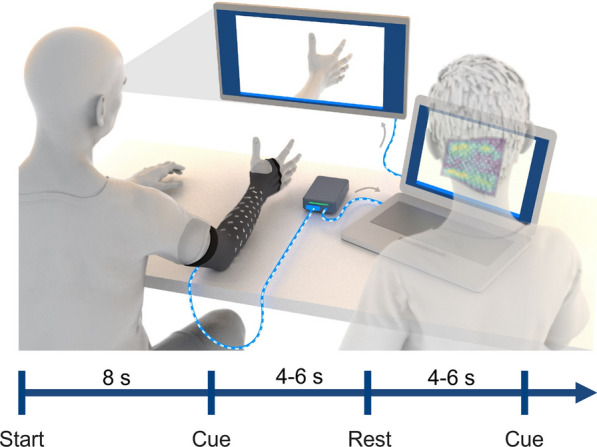
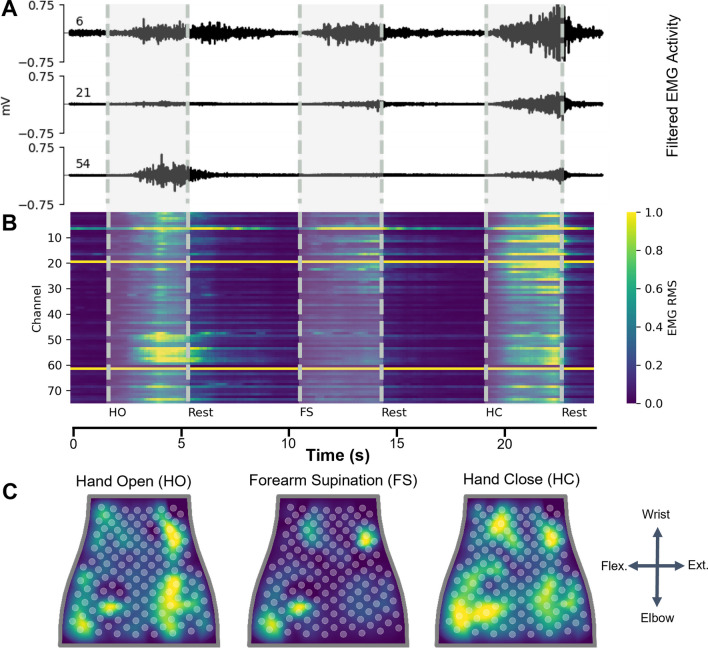
Approach: To address these limitations, we have developed the NeuroLife® EMG System, an investigational device which consists of a wearable forearm sleeve with 150 embedded electrodes and associated hardware and software to record and decode surface EMG. Here, we demonstrate accurate decoding of 12 functional hand, wrist, and forearm movements in chronic stroke survivors, including multiple types of grasps from participants with varying levels of impairment. We also collected usability data to assess how the system meets user needs to inform future design considerations.
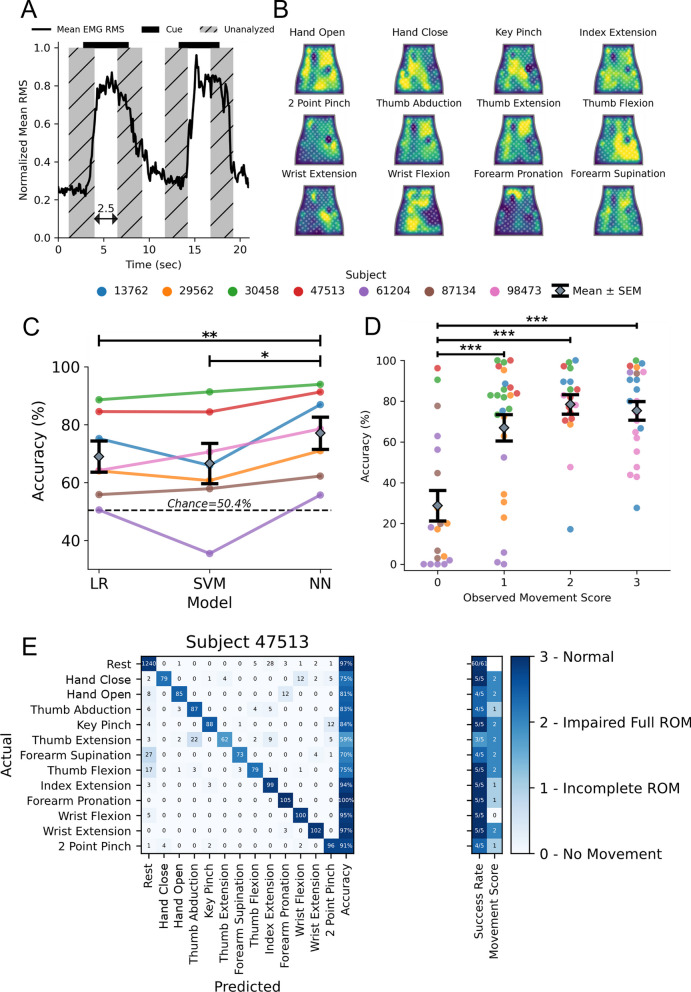
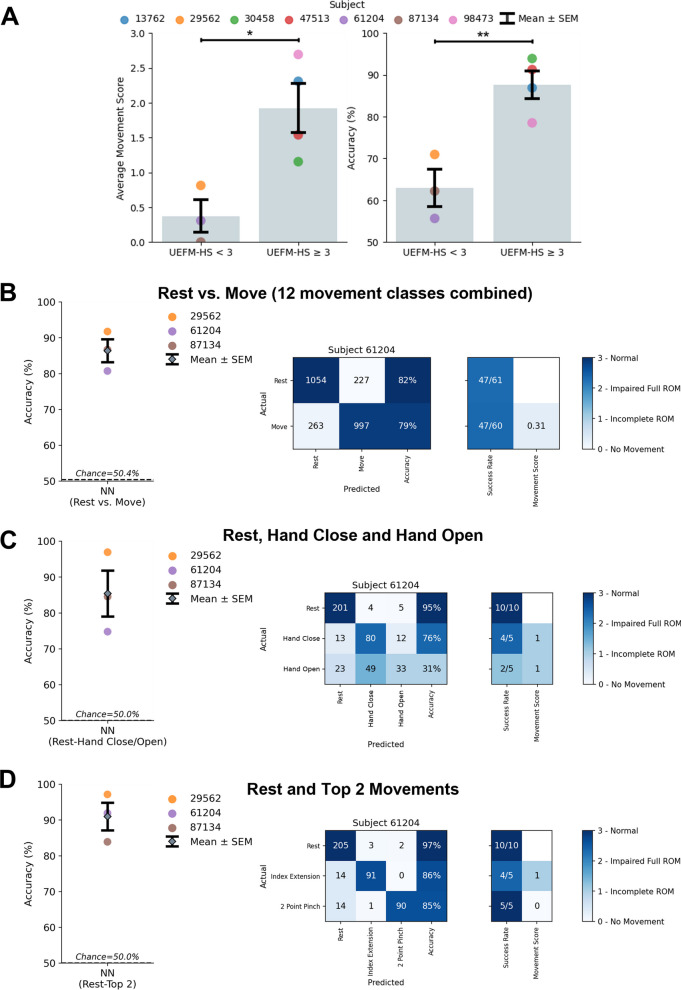
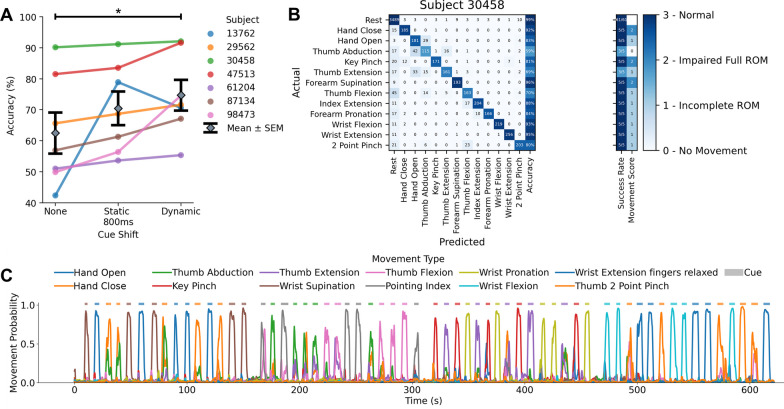
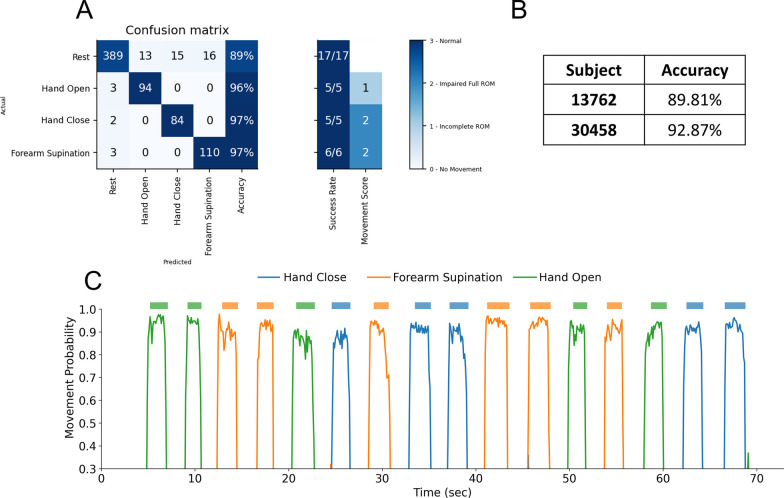
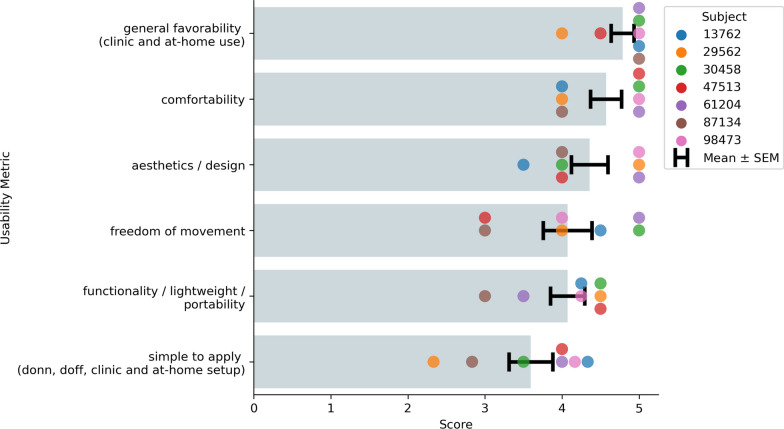
Main results: Our decoding algorithm trained on historical- and within-session data produced an overall accuracy of 77.1 ± 5.6% across 12 movements and rest in stroke participants. For individuals with severe hand impairment, we demonstrate the ability to decode a subset of two fundamental movements and rest at 85.4 ± 6.4% accuracy. In online scenarios, two stroke survivors achieved 91.34 ± 1.53% across three movements and rest, highlighting the potential as a control mechanism for assistive technologies. Feedback from stroke survivors who tested the system indicates that the sleeve's design meets various user needs, including being comfortable, portable, and lightweight. The sleeve is in a form factor such that it can be used at home without an expert technician and can be worn for multiple hours without discomfort.
Significance: The NeuroLife EMG System represents a platform technology to record and decode high-resolution EMG for the real-time control of assistive devices in a form factor designed to meet user needs. The NeuroLife EMG System is currently limited by U.S. federal law to investigational use.
© 2024. The Author(s).
Conflict of interest statement
All authors declare no conflict of interest.
Figures
References
-
- Virani SS, Alonso A, Aparicio HJ, Benjamin EJ, Bittencourt MS, Callaway CW, Carson AP, Chamberlain AM, Cheng S, Delling FN, Elkind MSV, Evenson KR, Ferguson JF, Gupta DK, Khan SS, Kissela BM, Knutson KL, Lee CD, Lewis TT, Liu J, Loop MS, Lutsey PL, Ma J, Mackey J, Martin SS, Matchar DB, Mussolino ME, Navaneethan SD, Perak AM, Roth GA, Samad Z, Satou GM, Schroeder EB, Shah SH, Shay CM, Stokes A, VanWagner LB, Wang N-Y, Tsao CW. Heart Disease and Stroke Statistics—2021 Update. Circulation. 2021;143:e146. doi: 10.1161/CIR.0000000000000950. - DOI - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous
