

Separable Tendon-Driven Robotic Manipulator with a Long, Flexible, Passive Proximal Section
- PMID: 38328596
- PMCID: PMC10845131
- DOI: 10.1115/1.4062354
Separable Tendon-Driven Robotic Manipulator with a Long, Flexible, Passive Proximal Section
Abstract
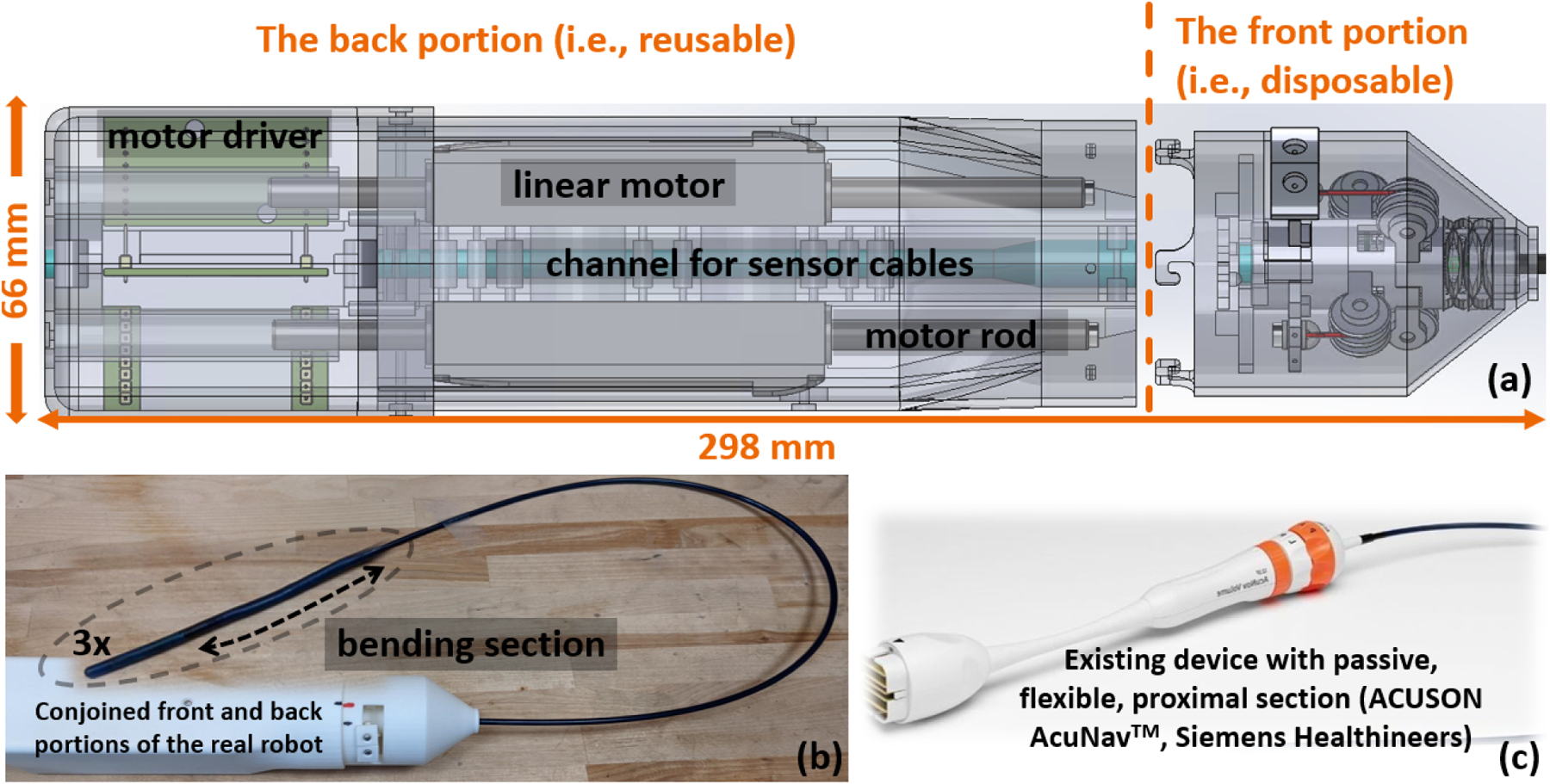
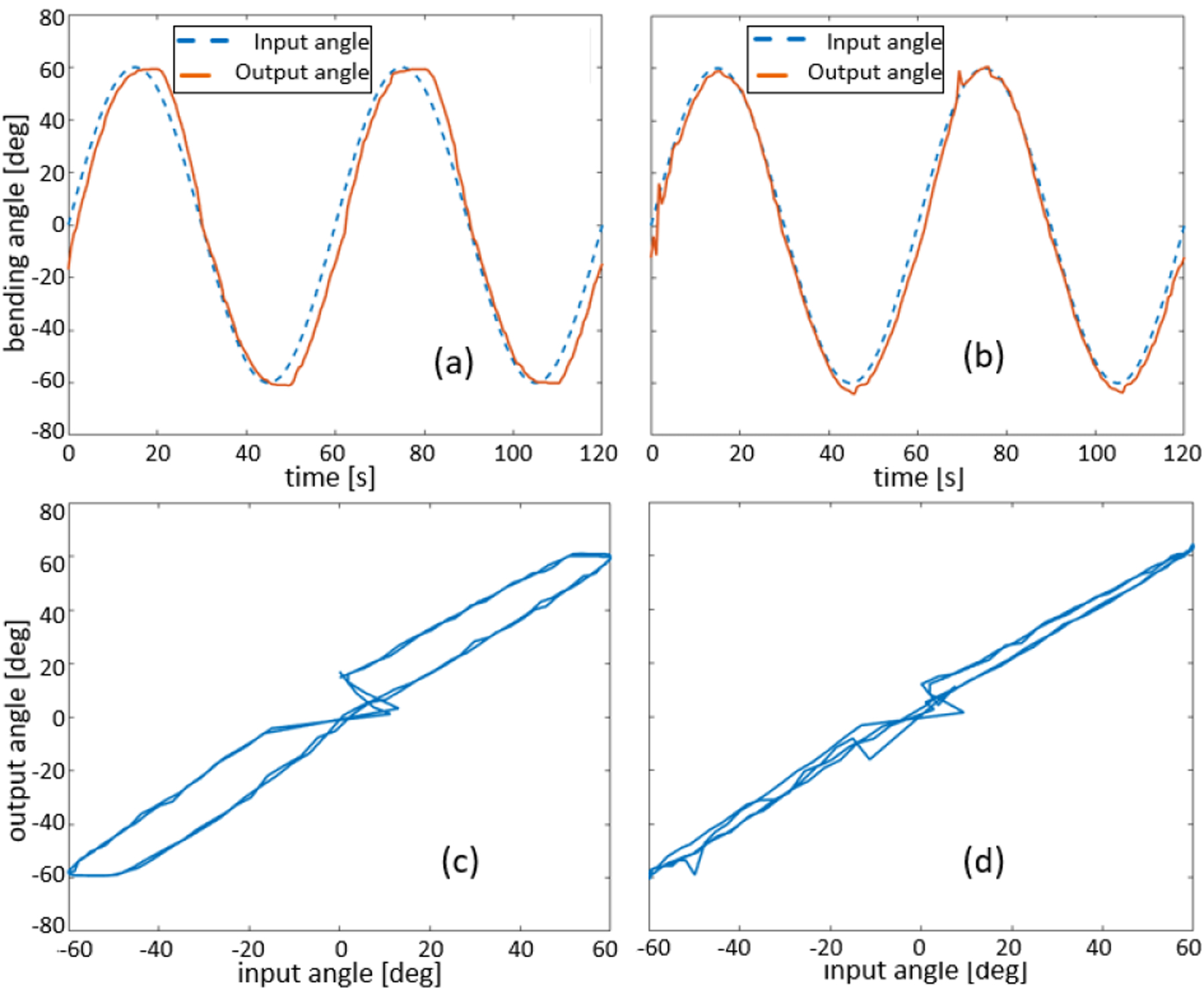
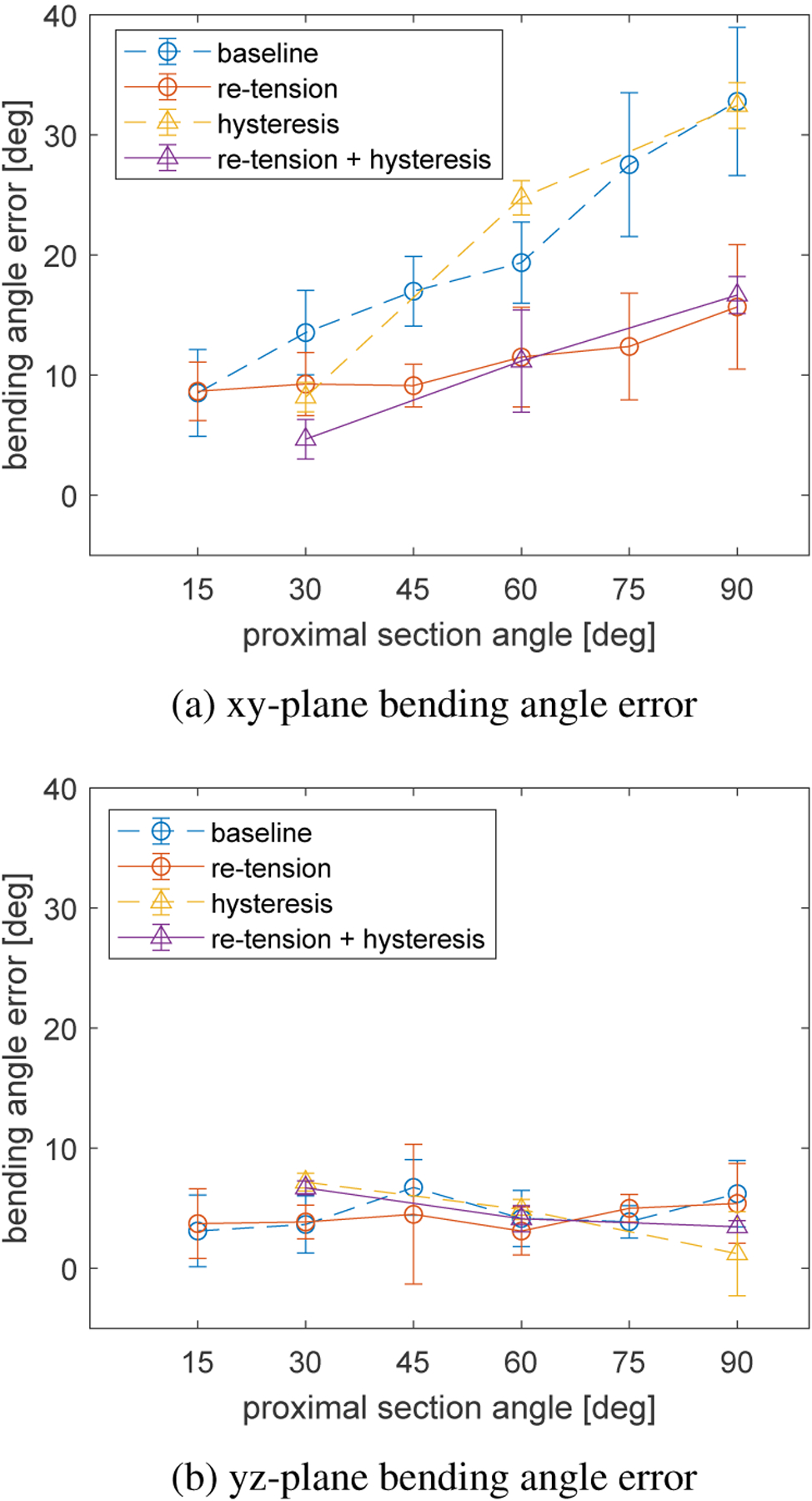
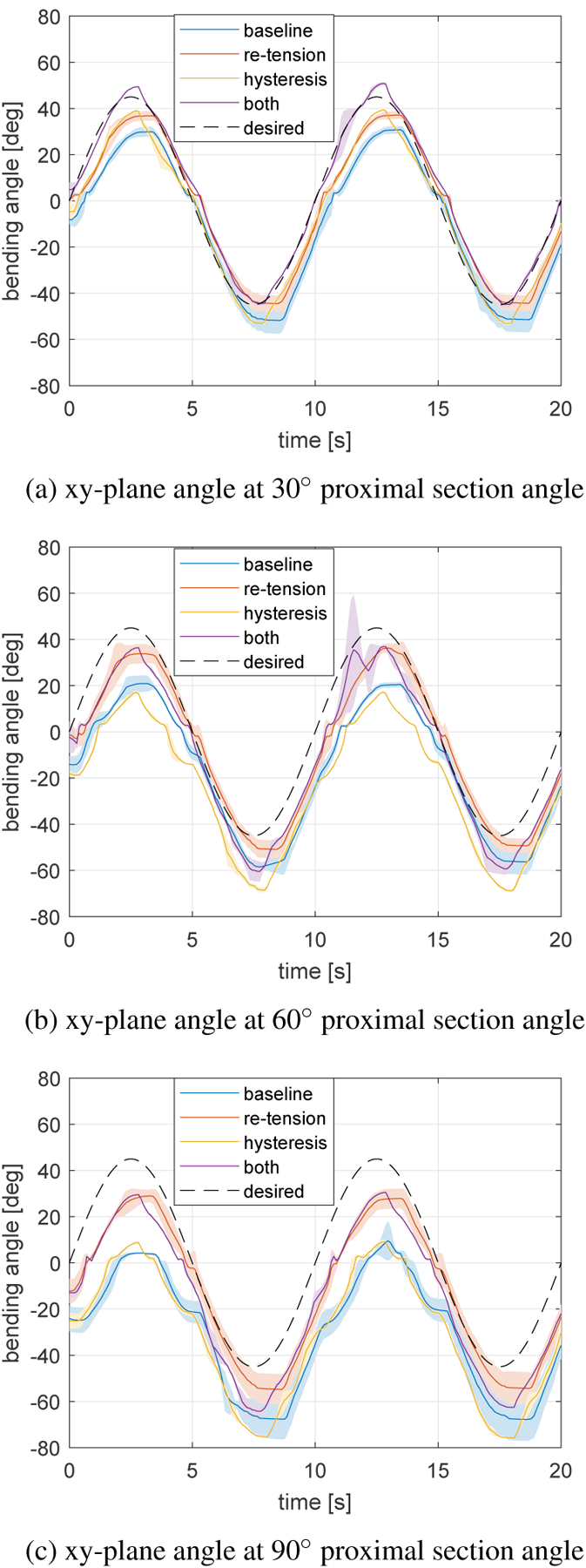
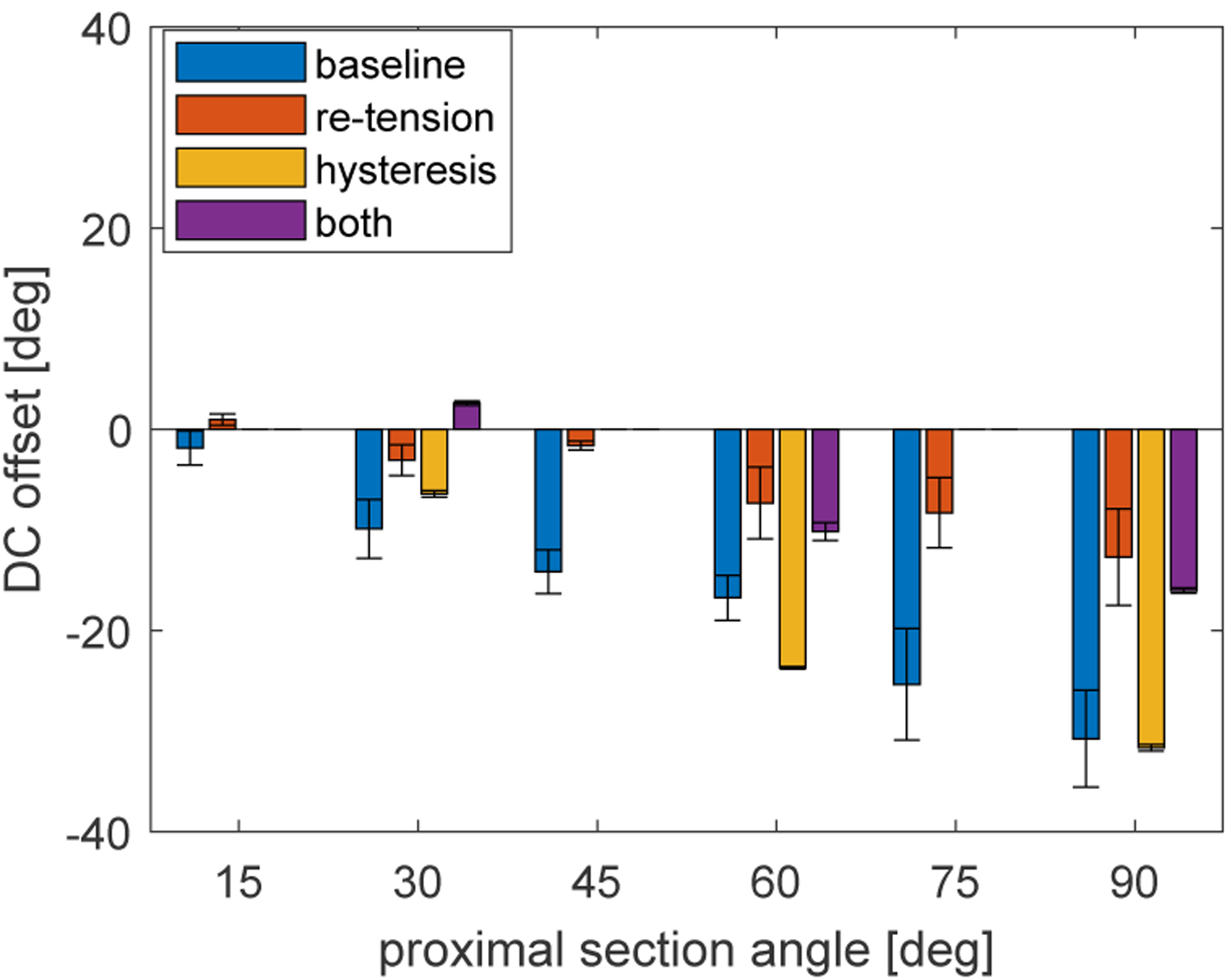
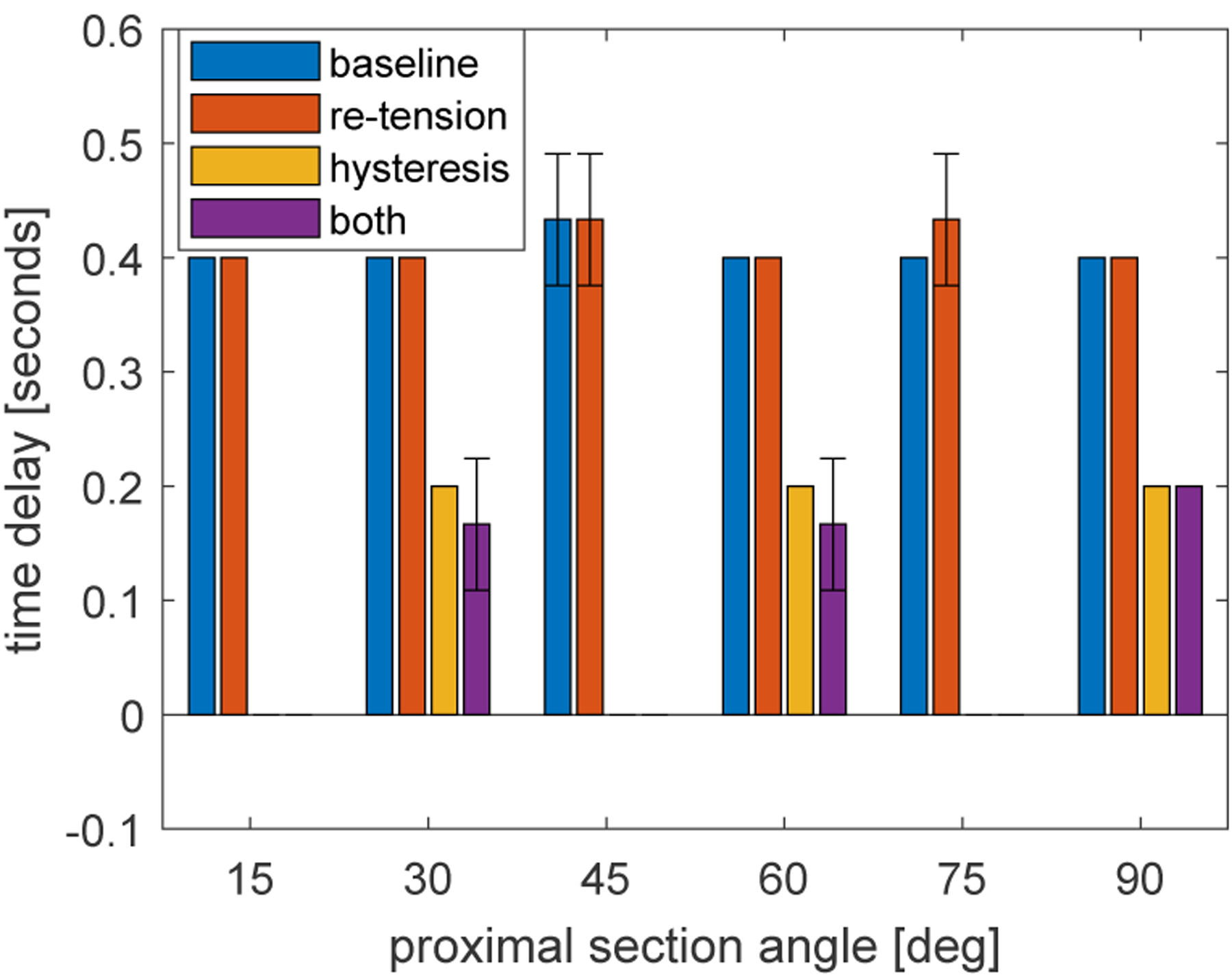
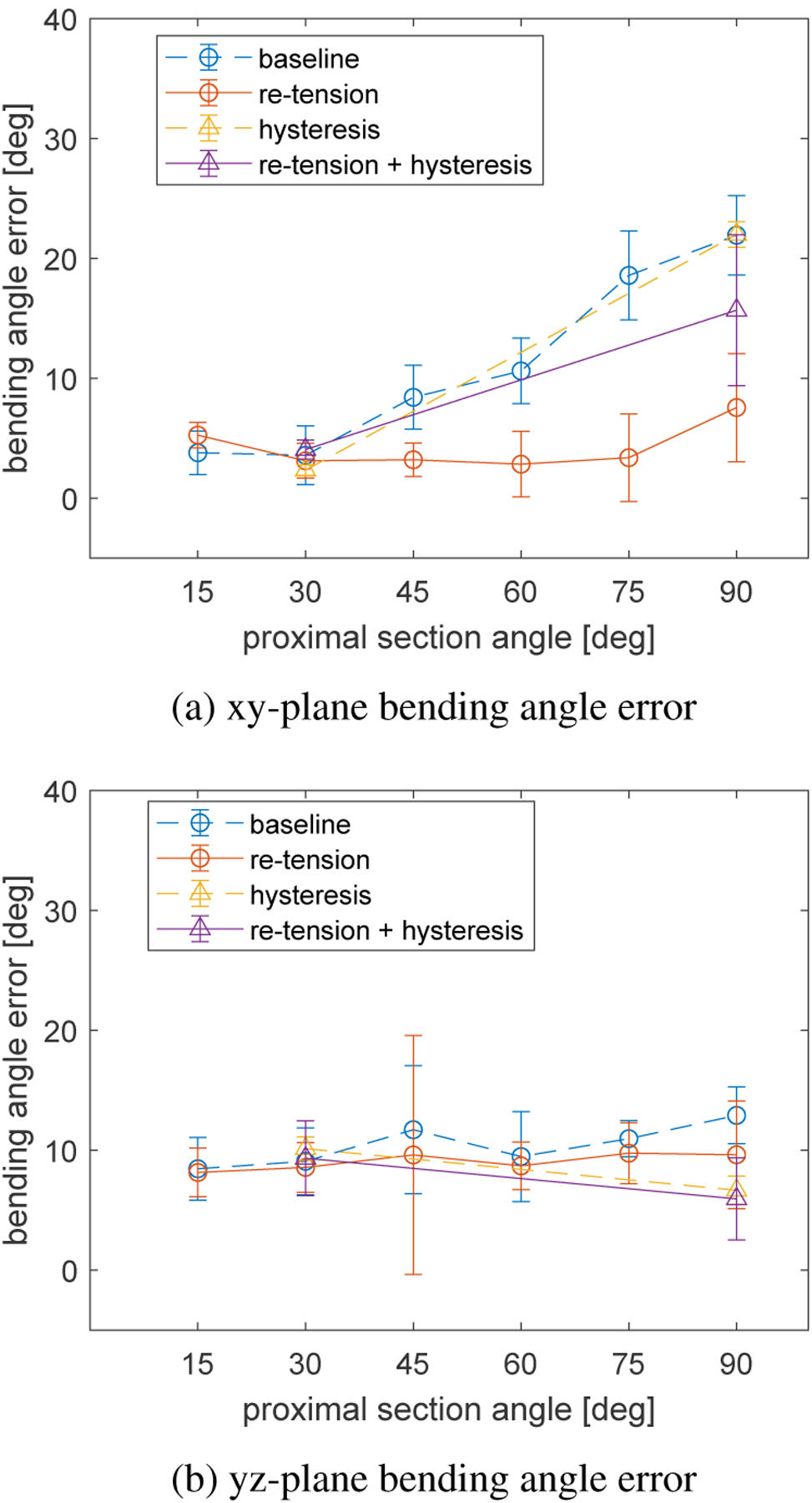
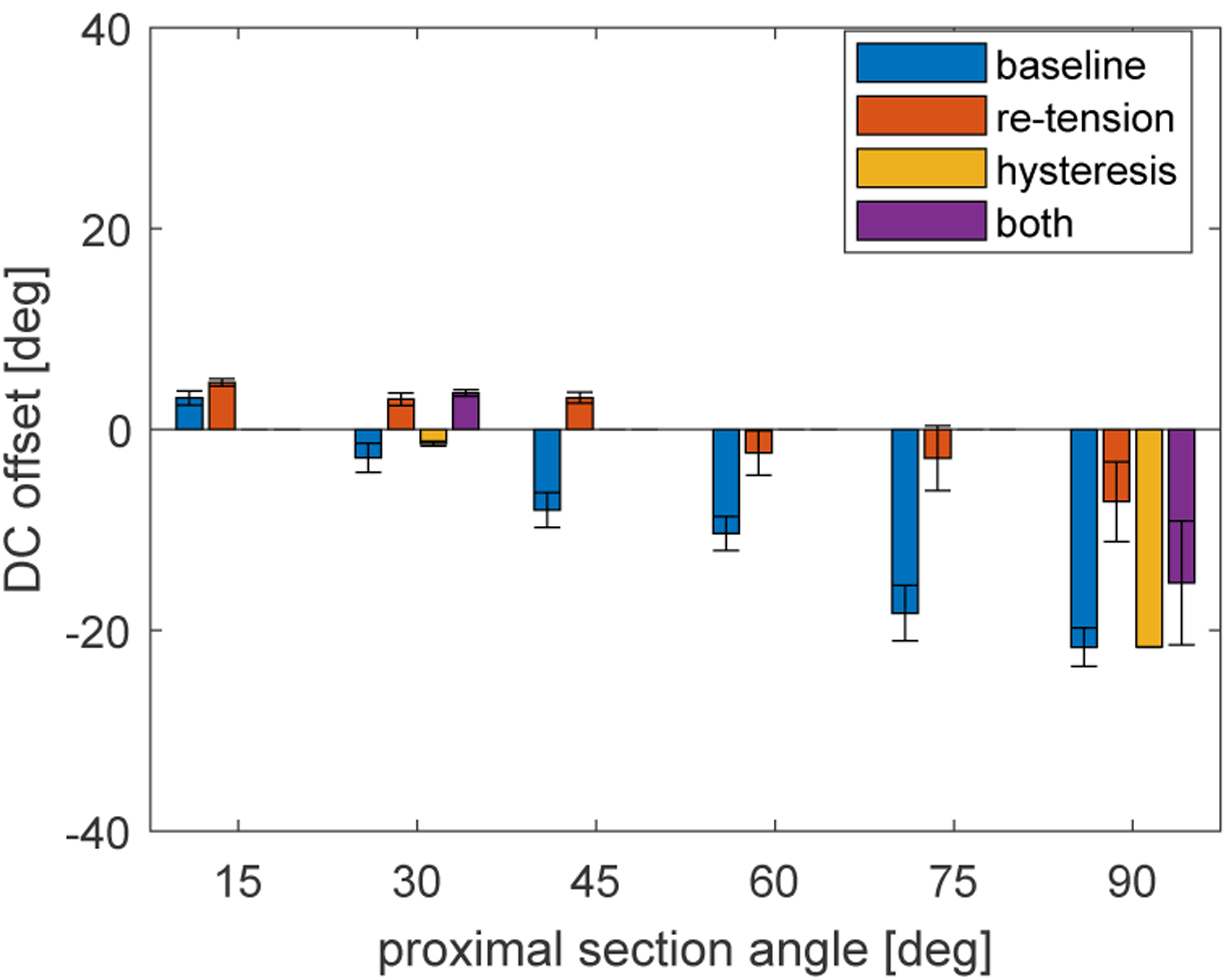
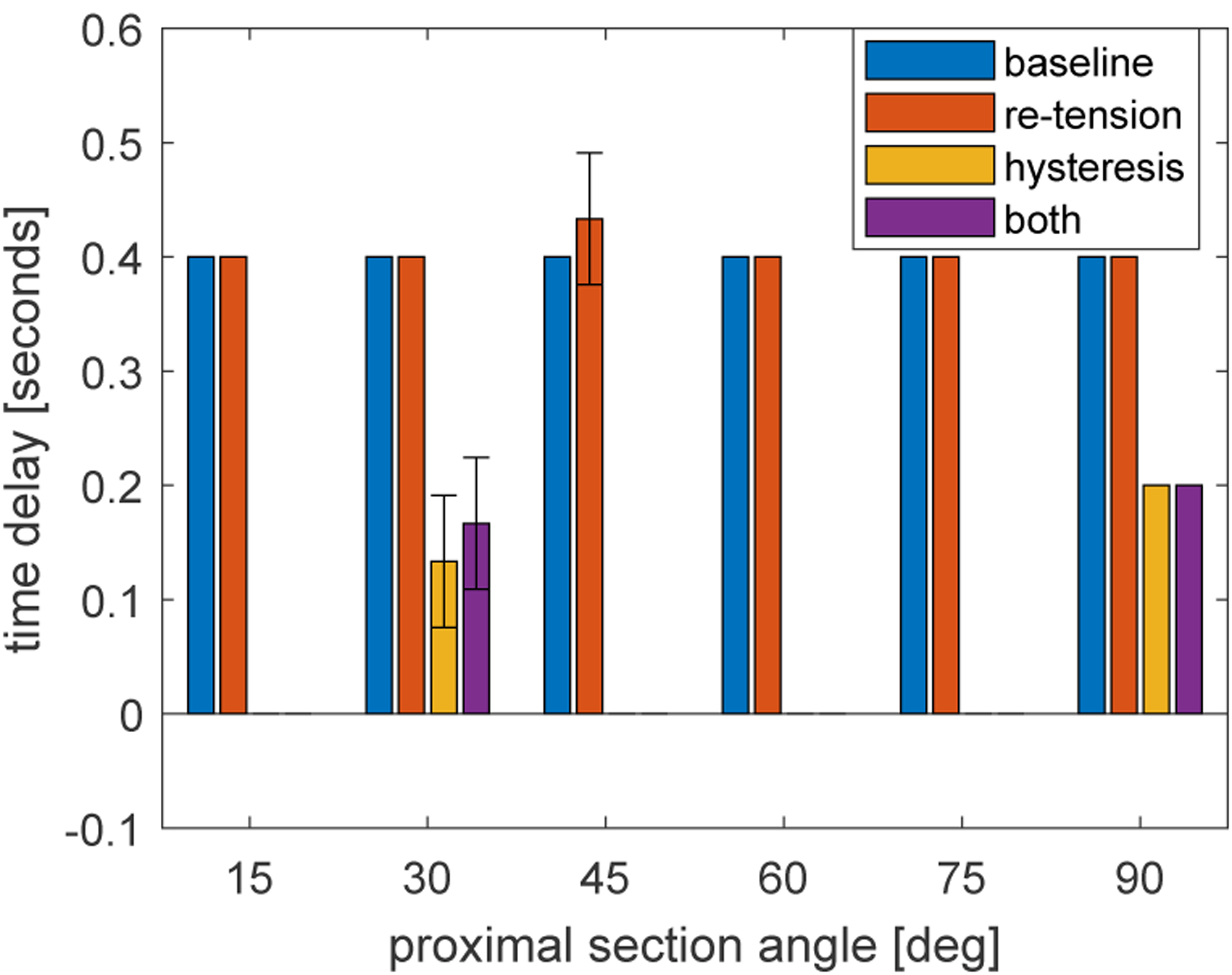
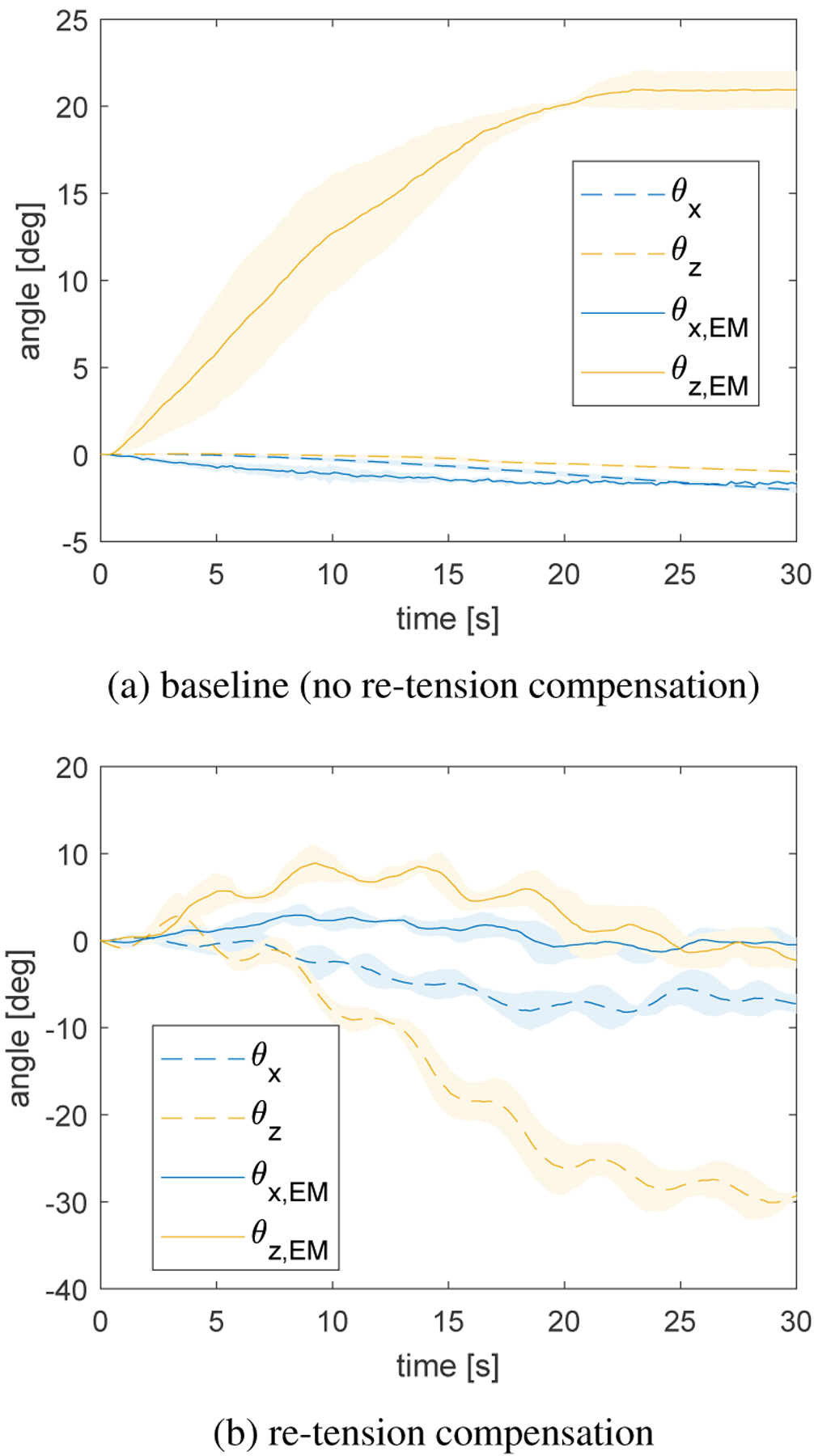
This work tackles practical issues which arise when using a tendon-driven robotic manipulator (TDRM) with a long, flexible, passive proximal section in medical applications. Tendon-driven devices are preferred in medicine for their improved outcomes via minimally invasive procedures, but TDRMs come with unique challenges such as sterilization and reuse, simultaneous control of tendons, hysteresis in the tendon-sheath mechanism, and unmodeled effects of the proximal section shape. A separable TDRM which overcomes difficulties in actuation and sterilization is introduced, in which the body containing the electronics is reusable and the remainder is disposable. An open-loop redundant controller which resolves the redundancy in the kinematics is developed. Simple linear hysteresis compensation and re-tension compensation based on the physical properties of the device are proposed. The controller and compensation methods are evaluated on a testbed for a straight proximal section, a curved proximal section at various static angles, and a proximal section which dynamically changes angles; and overall, distal tip error was reduced.
Figures
References
-
- Stereotaxis, 2020, Stereotaxis v-drive robotic navigation system, Feb. http://www.stereotaxis.com/products/vdrive.
-
- Kim Y-H, Collins J, Li Z, Chinnadurai P, Kapoor A, Lin CH, and Mansi T, 2022, “Automated catheter tip repositioning for intra-cardiac echocardiography,” International Journal of Computer Assisted Radiology and Surgery, 17, p. 1409–1417. - PubMed
-
- Reddy MD,VY, Neuzil MD,P, Malchano BS,ZJ, Vijaykumar BS,R, Cury MD,R, Abbara MD,S, Weichet MD,J, McPherson BS,CD, and Ruskin MD,JN, 2007, “View-Synchronized Robotic Image-Guided Therapy for Atrial Fibrillation Ablation,” Circulation, 115(21), May, pp. 2705–2714. - PubMed
-
- Intuitive Surgical, 2022, Ion platform - robotic-assisted bronchoscopy https://www.intuitive.com/en-us/products-and-services/ion.
Grants and funding
LinkOut - more resources
Full Text Sources