

An intelligent grasper to provide real-time force feedback to shorten the learning curve in laparoscopic training
- PMID: 38378608
- PMCID: PMC10880316
- DOI: 10.1186/s12909-024-05155-1
An intelligent grasper to provide real-time force feedback to shorten the learning curve in laparoscopic training
Abstract
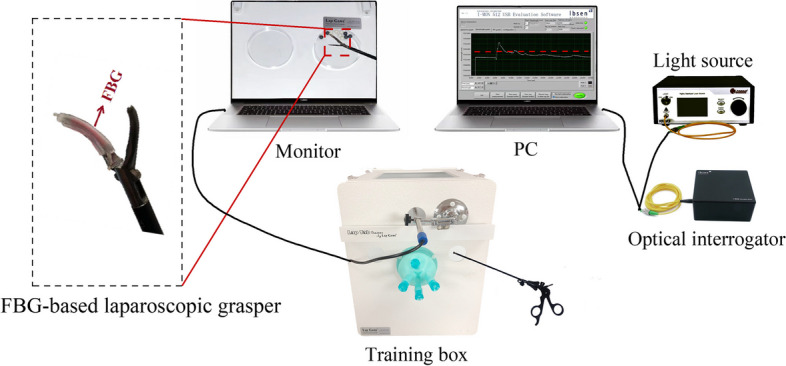
Background: A lack of force feedback in laparoscopic surgery often leads to a steep learning curve to the novices and traditional training system equipped with force feedback need a high educational cost. This study aimed to use a laparoscopic grasper providing force feedback in laparoscopic training which can assist in controlling of gripping forces and improve the learning processing of the novices.
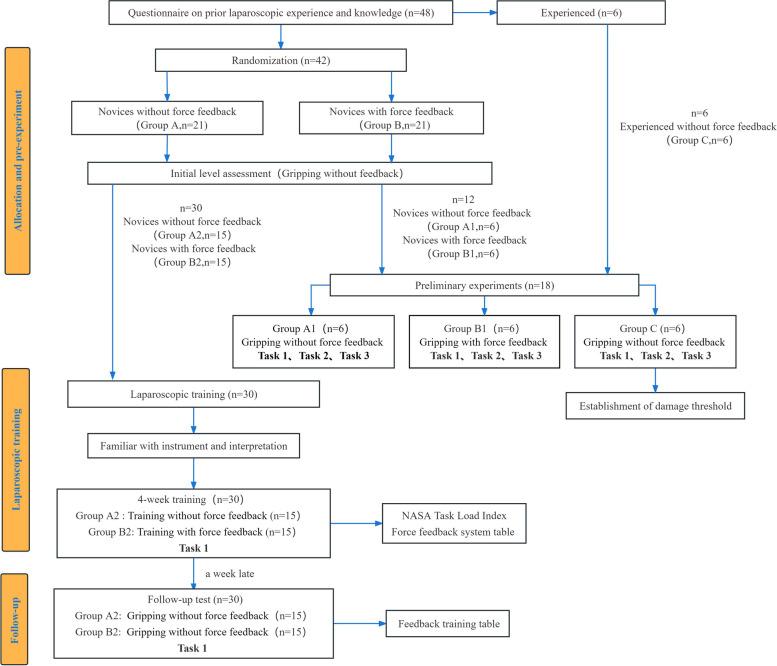
Methods: Firstly, we conducted a pre-experiment to verify the role of force feedback in gripping operations and establish the safe gripping force threshold for the tasks. Following this, we proceeded with a four-week training program. Unlike the novices without feedback (Group A2), the novices receiving feedback (Group B2) underwent training that included force feedback. Finally, we completed a follow-up period without providing force feedback to assess the training effect under different conditions. Real-time force parameters were recorded and compared.
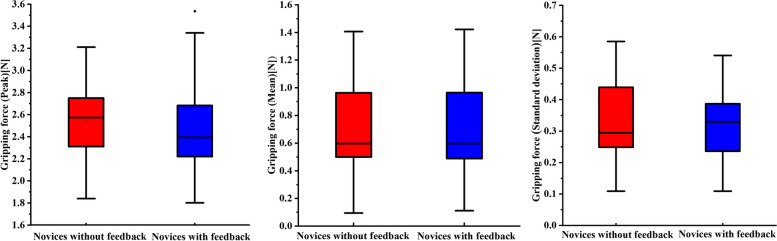
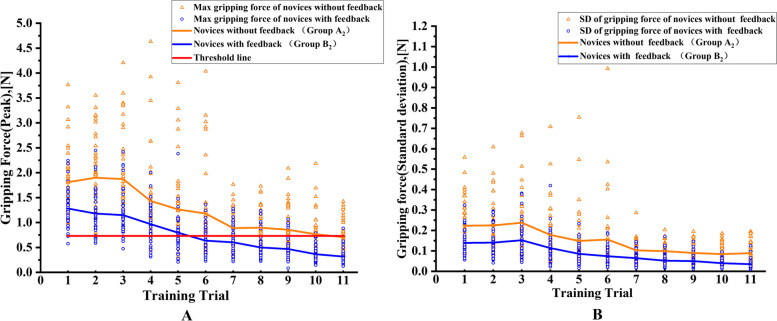
Results: In the pre-experiment, we set the gripping force threshold for the tasks based on the experienced surgeons' performance. This is reasonable as the experienced surgeons have obtained adequate skill of handling grasper. The thresholds for task 1, 2, and 3 were set as 0.731 N, 1.203 N and 0.938 N, respectively. With force feedback, the gripping force applied by the novices with feedback (Group B1) was lower than that of the novices without feedback (Group A1) (p < 0.005). During the training period, the Group B2 takes 6 trails to achieve gripping force of 0.635 N, which is lower than the threshold line, whereas the Group A2 needs 11 trails, meaning that the learning curve of Group B2 was significantly shorter than that of Group A2. Additionally, during the follow-up period, there was no significant decline in force learning, and Group B2 demonstrated better control of gripping operations. The training with force feedback received positive evaluations.
Conclusion: Our study shows that using a grasper providing force feedback in laparoscopic training can help to control the gripping force and shorten the learning curve. It is anticipated that the laparoscopic grasper equipped with FBG sensor is promising to provide force feedback during laparoscopic training, which ultimately shows great potential in laparoscopic surgery.
Keywords: Fiber Bragg grating; Force feedback; Laparoscopic training; Learning curve; Minimally invasive surgery.
© 2024. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures

Similar articles
-
Smart laparoscopic grasper integrated with fiber Bragg grating based tactile sensor for real-time force feedback.J Biophotonics. 2022 May;15(5):e202100331. doi: 10.1002/jbio.202100331. Epub 2022 Jan 20. J Biophotonics. 2022. PMID: 35020276
-
The role of tactile feedback in grip force during laparoscopic training tasks.Surg Endosc. 2013 Apr;27(4):1111-8. doi: 10.1007/s00464-012-2612-x. Epub 2012 Dec 12. Surg Endosc. 2013. PMID: 23233002
-
Comparison of the performance of experienced and novice surgeons: measurement of gripping force during laparoscopic surgery performed on pigs using forceps with pressure sensors.Surg Endosc. 2017 Apr;31(4):1999-2005. doi: 10.1007/s00464-016-5153-x. Epub 2016 Aug 29. Surg Endosc. 2017. PMID: 27572059
-
Take-Home Training in Laparoscopy.Dan Med J. 2017 Apr;64(4):B5335. Dan Med J. 2017. PMID: 28385174 Review.
-
Quality training in laparoscopic colorectal surgery: does it improve clinical outcome?Tech Coloproctol. 2011 Oct;15 Suppl 1:S17-20. doi: 10.1007/s10151-011-0746-9. Tech Coloproctol. 2011. PMID: 21887564 Review.
Cited by
-
Pilot Evaluation of Silicone Surrogates for Oral Mucosa Simulation in Craniofacial Surgical Training.Biomimetics (Basel). 2024 Aug 1;9(8):464. doi: 10.3390/biomimetics9080464. Biomimetics (Basel). 2024. PMID: 39194443 Free PMC article.
-
Exploring the Role of Artificial Intelligence (AI)-Driven Training in Laparoscopic Suturing: A Systematic Review of Skills Mastery, Retention, and Clinical Performance in Surgical Education.Healthcare (Basel). 2025 Mar 6;13(5):571. doi: 10.3390/healthcare13050571. Healthcare (Basel). 2025. PMID: 40077133 Free PMC article. Review.
References
-
- Zhu R, Marechal M, Suetsugu M, Yamamoto I, Lawn MJ, Matsumoto K, et al. Research and Development of testing device for evaluating force transmission and grasping pressure of laparoscopic forceps. Sensor Mater. 2019;31:4205–4214. doi: 10.18494/SAM.2019.2419. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
