

Trajectory Following Control of an Unmanned Vehicle for Marine Environment Sensing
- PMID: 38400420
- PMCID: PMC10893141
- DOI: 10.3390/s24041262
Trajectory Following Control of an Unmanned Vehicle for Marine Environment Sensing
Abstract
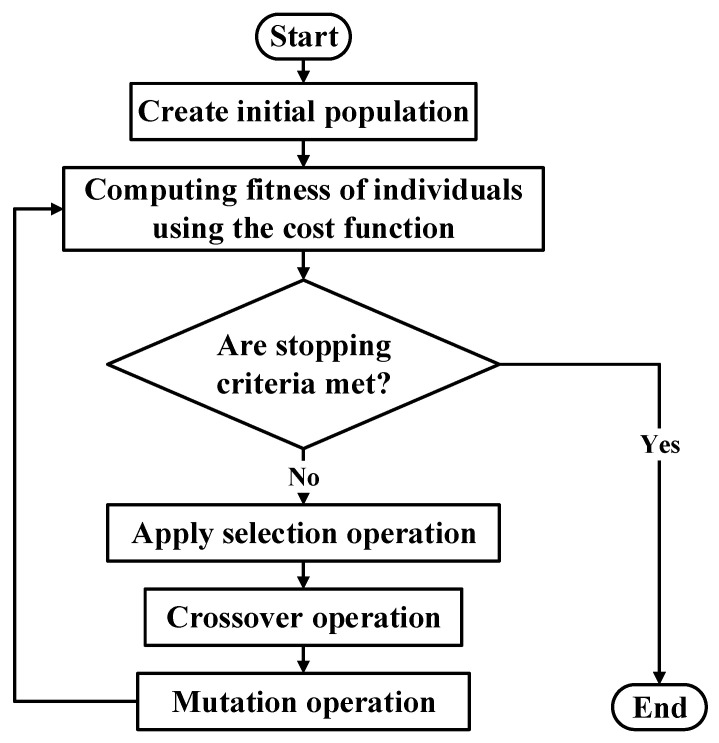
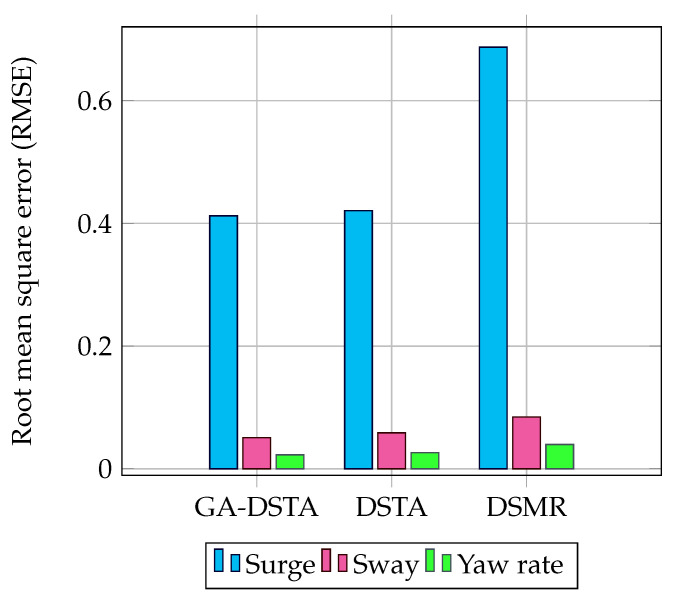
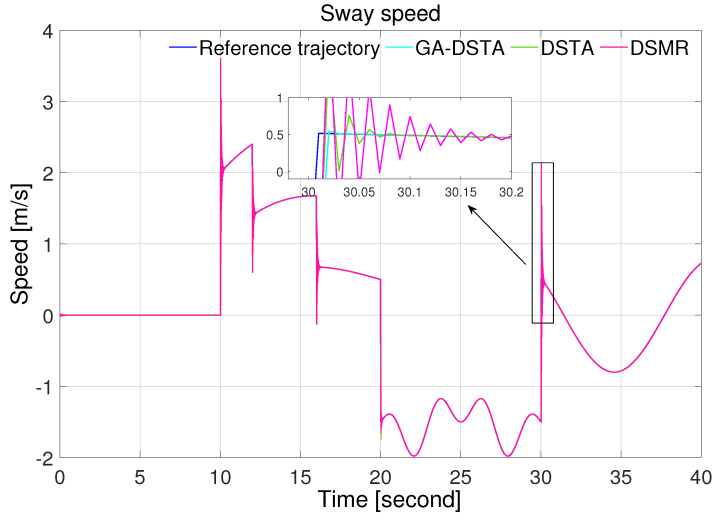
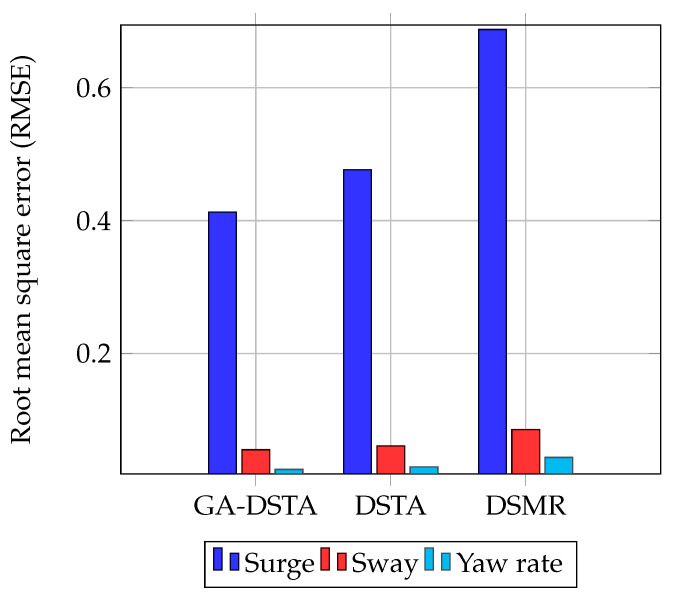
An autonomous surface vehicle is indispensable for sensing of marine environments owing to its challenging and dynamic conditions. To accomplish this task, the vehicle has to navigate through a desired trajectory. However, due to the complexity and dynamic nature of a marine environment affected by factors such as ocean currents, waves, and wind, a robust controller is of paramount importance for maintaining the vehicle along the desired trajectory by minimizing the trajectory error. To this end, in this study, we propose a robust discrete-time super-twisting second-order sliding mode controller (DSTA). Besides, this control method effectively suppresses the chattering effect. To start with, the vehicle's model is discretized using an integral approximation with nonlinear terms including environmental disturbances treated as perturbation terms. Then, the perturbation is estimated using a time delay estimator (TDE), which further enhances the robustness of the proposed method and allows us to choose smaller controller gains. Moreover, we employ a genetic algorithm (GA) to tune the controller gains based on a quadratic cost function that considers the tracking error and control energy. The stability of the proposed sliding mode controller (SMC) is rigorously demonstrated using a Lyapunov approach. The controller is implemented using the Simulink® software. Finally, a conventional discrete-time SMC based on the reaching law (DSMR) and a heuristically tuned DSTA controller are used as benchmarks to compare the tracking accuracy and chattering attenuation capability of the proposed GA based DSTA (GA-DSTA). Simulation results are presented both with or without external disturbances. The simulation results demonstrate that the proposed controller drives the vehicle along the desired trajectory successfully and outperforms the other two controllers.
Keywords: Lyapunov stability; chattering; estimation; genetic algorithm; marine; sensing; sliding mode control; trajectory following; vehicle.
Conflict of interest statement
The authors declare no conflict of interest.
Figures













Similar articles
-
Novel adaptive law for super-twisting controller: USV tracking control under disturbances.ISA Trans. 2023 Aug;139:561-573. doi: 10.1016/j.isatra.2023.04.024. Epub 2023 Apr 20. ISA Trans. 2023. PMID: 37142492
-
An improved trajectory tracking control of quadcopter using a novel Sliding Mode Control with Fuzzy PID Surface.PLoS One. 2024 Nov 21;19(11):e0308997. doi: 10.1371/journal.pone.0308997. eCollection 2024. PLoS One. 2024. PMID: 39570843 Free PMC article.
-
Epilepsy control using a fixed time integral super twisting sliding mode control for Pinsky-Rinzel pyramidal model through ion channels with optogenetic method.Comput Methods Programs Biomed. 2020 Oct;195:105665. doi: 10.1016/j.cmpb.2020.105665. Epub 2020 Jul 22. Comput Methods Programs Biomed. 2020. PMID: 32736006
-
Trajectory tracking of a quadrotor using a robust adaptive type-2 fuzzy neural controller optimized by cuckoo algorithm.ISA Trans. 2021 Aug;114:171-190. doi: 10.1016/j.isatra.2020.12.047. Epub 2020 Dec 31. ISA Trans. 2021. PMID: 33422331
-
Optimal third-order sliding mode controller for dual star induction motor based on grey wolf optimization algorithm.Heliyon. 2024 Jun 7;10(12):e32669. doi: 10.1016/j.heliyon.2024.e32669. eCollection 2024 Jun 30. Heliyon. 2024. PMID: 39183859 Free PMC article. Review.
References
-
- Yuh J., Marani G., Blidberg D.R. Applications of marine robotic vehicles. Intell. Serv. Robot. 2011;4:221–231. doi: 10.1007/s11370-011-0096-5. - DOI
LinkOut - more resources
Full Text Sources
