

Advanced feedback enhances sensorimotor adaptation
- PMID: 38402615
- PMCID: PMC10990049
- DOI: 10.1016/j.cub.2024.01.073
Advanced feedback enhances sensorimotor adaptation
Abstract
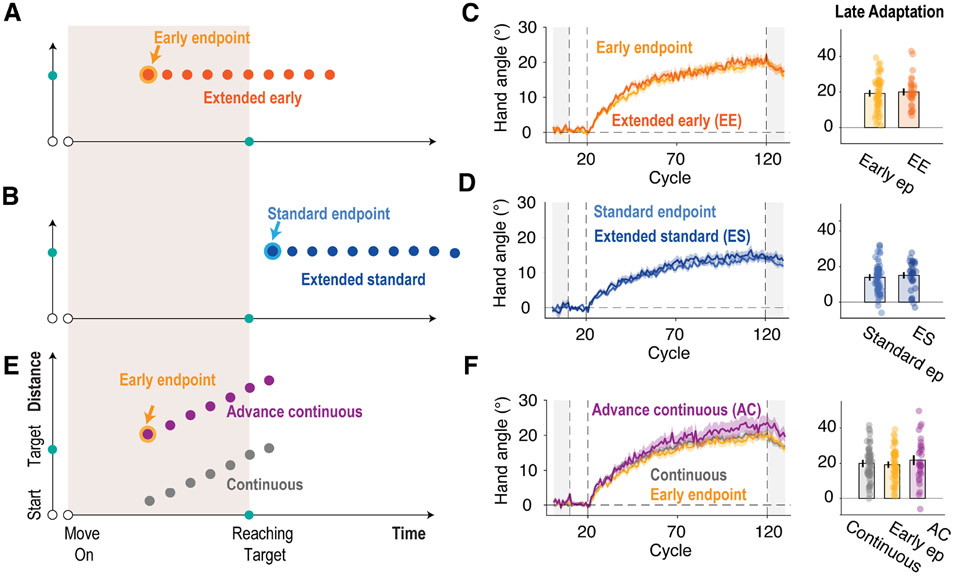
It is widely recognized that sensorimotor adaptation is facilitated when feedback is provided throughout the movement compared with when it is provided at the end of the movement. However, the source of this advantage is unclear: continuous feedback is more ecological, dynamic, and available earlier than endpoint feedback. Here, we assess the relative merits of these factors using a method that allows us to manipulate feedback timing independent of actual hand position. By manipulating the onset time of "endpoint" feedback, we found that adaptation was modulated in a non-monotonic manner, with the peak of the function occurring in advance of the hand reaching the target. Moreover, at this optimal time, learning was of similar magnitude as that observed with continuous feedback. By varying movement duration, we demonstrate that this optimal time occurs at a relatively fixed time after movement onset, an interval we hypothesize corresponds to when the comparison of the sensory prediction and feedback generates the strongest error signal.
Keywords: cerebellum; continuous feedback; endpoint feedback; feedback timing; sensorimotor adaptation.
Copyright © 2024 The Author(s). Published by Elsevier Inc. All rights reserved.
Conflict of interest statement
Declaration of interests R.B.I is a co-founder with equity in Magnetic Tides, Inc.
Figures




References
-
- Wolpert DM, and Flanagan JR (2001). Motor prediction. Curr. Biol 11, R729–32. - PubMed
-
- Krakauer JW, Hadjiosif AM, Xu J, Wong AL, and Haith AM (2019). Motor Learning. Compr. Physiol 9, 613–663. - PubMed
-
- Schween R, Taube W, Gollhofer A, and Leukel C (2014). Online and post-trial feedback differentially affect implicit adaptation to a visuomotor rotation. Exp. Brain Res 232, 3007–3013. - PubMed
-
- Hinder MR, Tresilian JR, Riek S, and Carson RG (2008). The contribution of visual feedback to visuomotor adaptation: how much and when? Brain Res. 1197, 123–134. - PubMed
