

[Research on mode adjustment control strategy of upper limb rehabilitation robot based on fuzzy recognition of interaction force]
- PMID: 38403608
- PMCID: PMC10894740
- DOI: 10.7507/1001-5515.202207018
[Research on mode adjustment control strategy of upper limb rehabilitation robot based on fuzzy recognition of interaction force]
Abstract
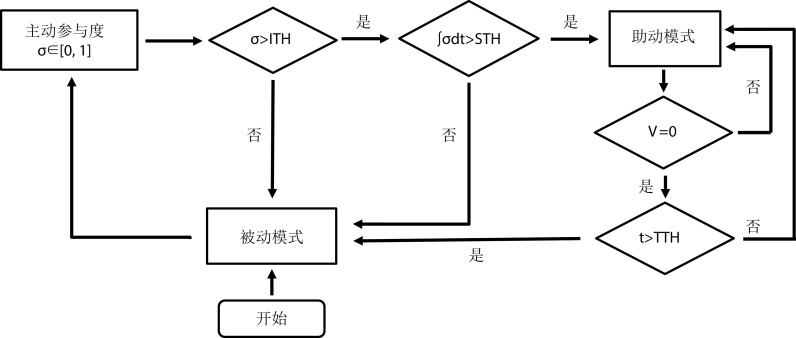
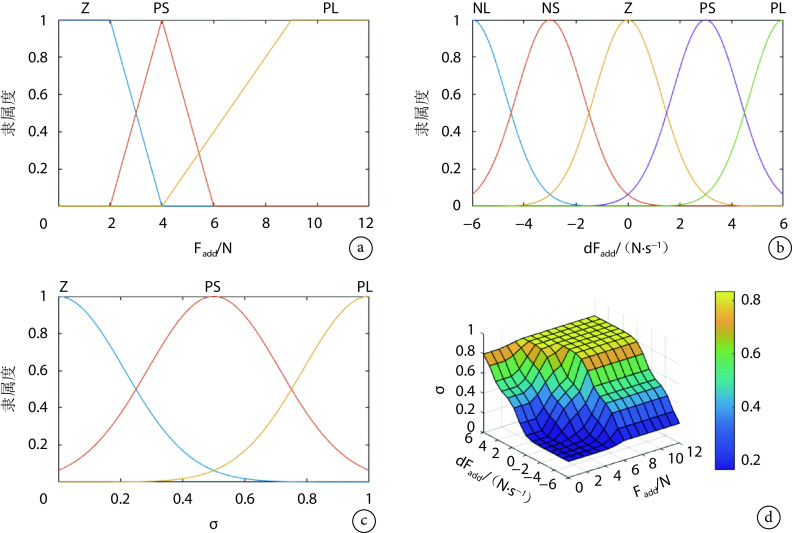
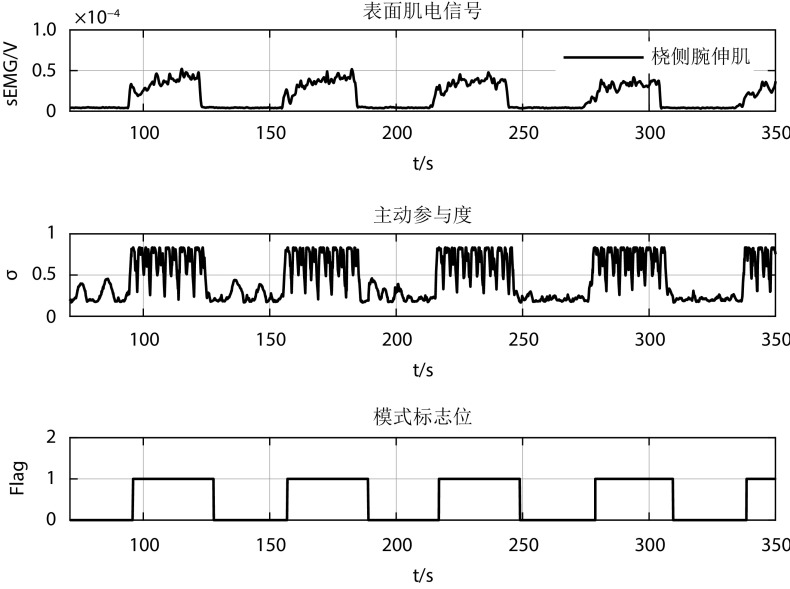
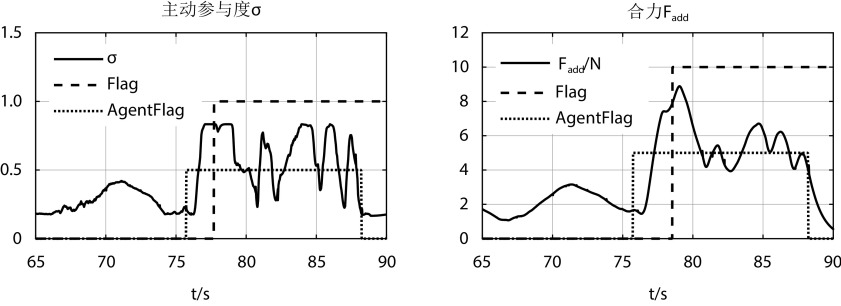
In the process of robot-assisted training for upper limb rehabilitation, a passive training strategy is usually used for stroke patients with flaccid paralysis. In order to stimulate the patient's active rehabilitation willingness, the rehabilitation therapist will use the robot-assisted training strategy for patients who gradually have the ability to generate active force. This study proposed a motor function assessment technology for human upper-limb based on fuzzy recognition on interaction force and human-robot interaction control strategy based on assistance-as-needed. A passive training mode based on the calculated torque controller and an assisted training mode combined with the potential energy field were designed, and then the interactive force information collected by the three-dimensional force sensor during the training process was imported into the fuzzy inference system, the degree of active participation σ was proposed, and the corresponding assisted strategy algorithms were designed to realize the adaptive adjustment of the two modes. The significant correlation between the degree of active participation σ and the surface electromyography signals (sEMG) was found through the experiments, and the method had a shorter response time compared to a control strategy that only adjusted the mode through the magnitude of interaction force, making the robot safer during the training process.
在上肢康复机器人辅助训练过程中,对于软瘫期脑卒中患者通常采用被动训练策略。为了激发患者的主动康复意愿,对于逐渐具备主动发力能力的患者,康复治疗师会采用机器人助动训练策略。本文针对末端牵引式上肢康复机器人,提出一种基于交互力模糊判别的人体上肢运动功能评估方法以及按需辅助的人机交互控制策略。首先设计了基于计算力矩控制器的被动训练和结合势能场的助动训练模式,然后将训练过程中三维力传感器采集的交互力信息引入至模糊推理系统中,提出了主动参与度 σ ,并设计相应的辅助策略算法实现两种训练模式的自适应调整。最后通过试验证明了主动参与度 σ 与表面肌电信号之间的相关性。并且,相较于仅通过交互力大小进行模式调整的控制策略,该方法具有更快的响应速度,使机器人在训练过程中更具安全性。.
Keywords: Assistance-as-needed; Correlation analysis; Degree of active participation; Fuzzy recognition; Motor function assessment for upper-limb.
Conflict of interest statement
利益冲突声明:本文全体作者均声明不存在利益冲突。
Figures

References
-
- Virani S S, Alonso A, Aparicio H J, et al Heart disease and stroke statistics-2021 update: a report from the American Heart Association. Circulation. 2021;143(8):254–743. - PubMed
-
- Warraich Z, Kleim J A Neural plasticity: the biological substrate for neurorehabilitation. PM R. 2010;2(12):208–219. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical