

Shaping high-performance wearable robots for human motor and sensory reconstruction and enhancement
- PMID: 38409128
- PMCID: PMC10897332
- DOI: 10.1038/s41467-024-46249-0
Shaping high-performance wearable robots for human motor and sensory reconstruction and enhancement
Abstract
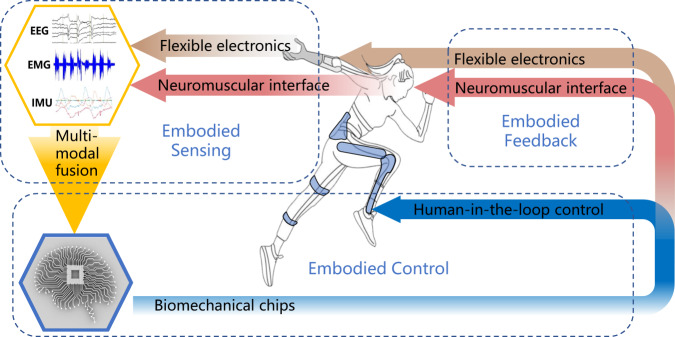
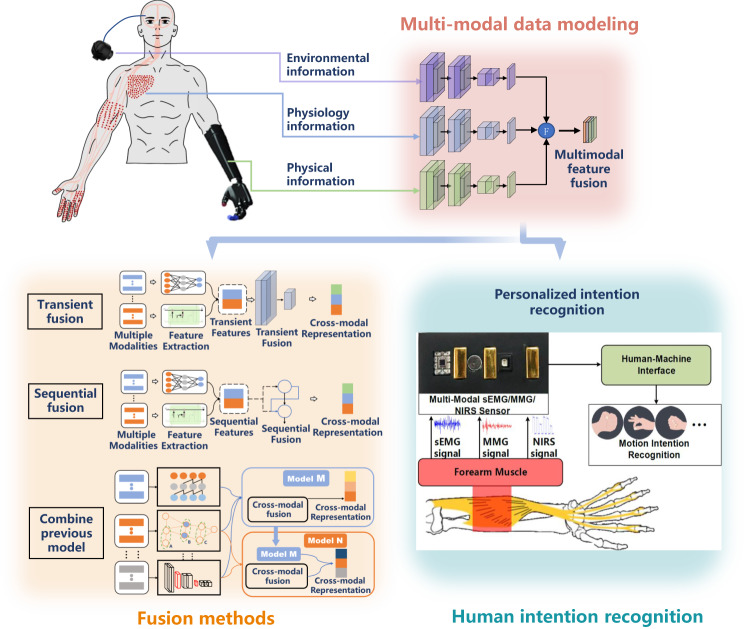
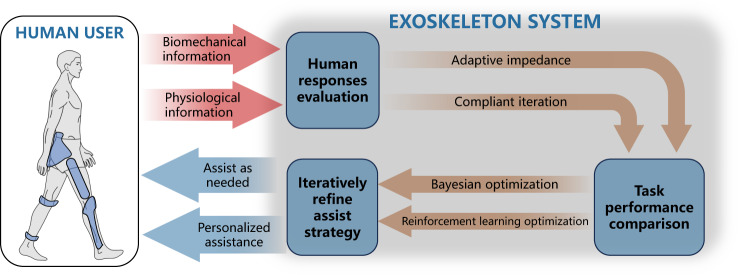
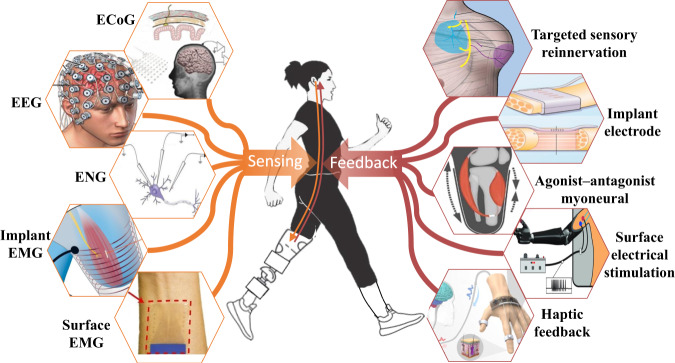
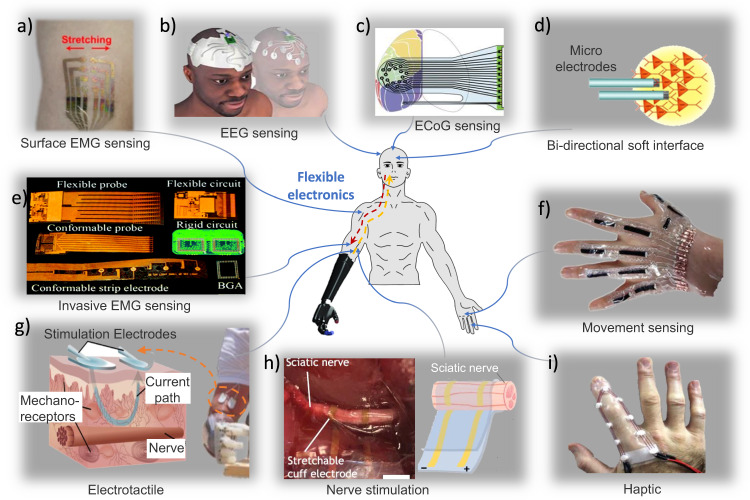
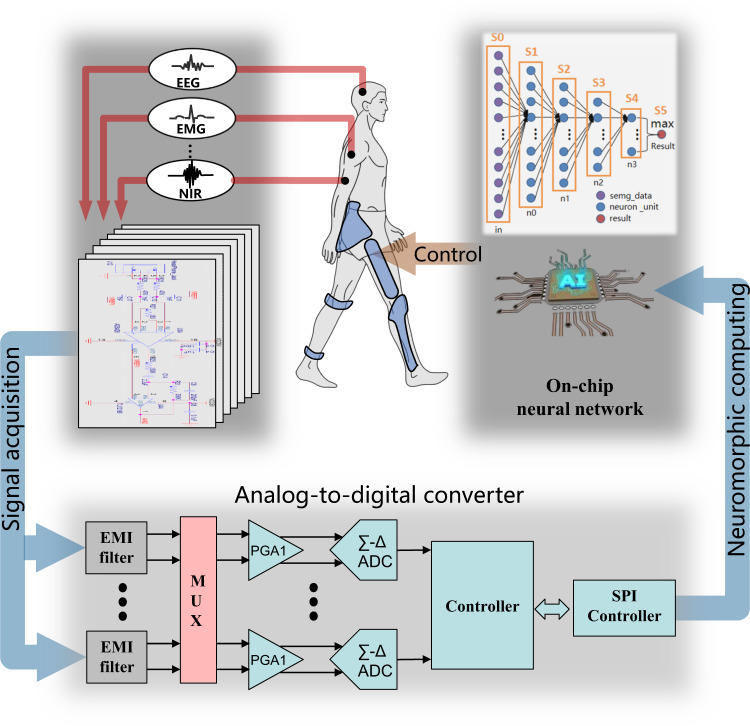
Most wearable robots such as exoskeletons and prostheses can operate with dexterity, while wearers do not perceive them as part of their bodies. In this perspective, we contend that integrating environmental, physiological, and physical information through multi-modal fusion, incorporating human-in-the-loop control, utilizing neuromuscular interface, employing flexible electronics, and acquiring and processing human-robot information with biomechatronic chips, should all be leveraged towards building the next generation of wearable robots. These technologies could improve the embodiment of wearable robots. With optimizations in mechanical structure and clinical training, the next generation of wearable robots should better facilitate human motor and sensory reconstruction and enhancement.
© 2024. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Serino A, et al. Upper limb cortical maps in amputees with targeted muscle and sensory reinnervation. Brain. 2017;140:2993–3011. - PubMed
-
- Fritsch A, Lenggenhager B, Bekrater-Bodmann R. Prosthesis embodiment and attenuation of prosthetic touch in upper limb amputees – A proof-of-concept study. Conscious Cogn. 2021;88:103073. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
