

Recent Advances in Tactile Sensory Systems: Mechanisms, Fabrication, and Applications
- PMID: 38470794
- PMCID: PMC10935336
- DOI: 10.3390/nano14050465
Recent Advances in Tactile Sensory Systems: Mechanisms, Fabrication, and Applications
Abstract
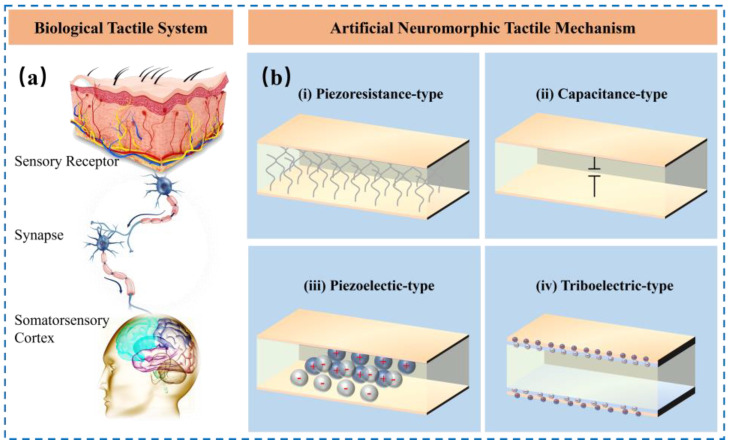
Flexible electronics is a cutting-edge field that has paved the way for artificial tactile systems that mimic biological functions of sensing mechanical stimuli. These systems have an immense potential to enhance human-machine interactions (HMIs). However, tactile sensing still faces formidable challenges in delivering precise and nuanced feedback, such as achieving a high sensitivity to emulate human touch, coping with environmental variability, and devising algorithms that can effectively interpret tactile data for meaningful interactions in diverse contexts. In this review, we summarize the recent advances of tactile sensory systems, such as piezoresistive, capacitive, piezoelectric, and triboelectric tactile sensors. We also review the state-of-the-art fabrication techniques for artificial tactile sensors. Next, we focus on the potential applications of HMIs, such as intelligent robotics, wearable devices, prosthetics, and medical healthcare. Finally, we conclude with the challenges and future development trends of tactile sensors.
Keywords: HMIs; fabrication techniques; mechanism; robotics; tactile sensors.
Conflict of interest statement
The authors declare no conflicts of interest.
Figures

Similar articles
-
Recent Advances in Flexible Tactile Sensors for Intelligent Systems.Sensors (Basel). 2021 Aug 10;21(16):5392. doi: 10.3390/s21165392. Sensors (Basel). 2021. PMID: 34450833 Free PMC article. Review.
-
Recent Progress in Flexible Piezoelectric Tactile Sensors: Materials, Structures, Fabrication, and Application.Sensors (Basel). 2025 Feb 5;25(3):964. doi: 10.3390/s25030964. Sensors (Basel). 2025. PMID: 39943602 Free PMC article. Review.
-
Emerging MXene-Based Flexible Tactile Sensors for Health Monitoring and Haptic Perception.Small. 2023 Jul;19(27):e2300283. doi: 10.1002/smll.202300283. Epub 2023 Mar 25. Small. 2023. PMID: 36965088 Review.
-
Conjugated Polymer-Based Nanocomposites for Pressure Sensors.Molecules. 2023 Feb 8;28(4):1627. doi: 10.3390/molecules28041627. Molecules. 2023. PMID: 36838615 Free PMC article. Review.
-
Recent Progress in Flexible Tactile Sensors for Human-Interactive Systems: From Sensors to Advanced Applications.Adv Mater. 2021 Nov;33(47):e2005902. doi: 10.1002/adma.202005902. Epub 2021 Apr 22. Adv Mater. 2021. PMID: 33887803 Review.
Cited by
-
Research Progress on Moisture-Sorption Actuators Materials.Nanomaterials (Basel). 2024 Sep 24;14(19):1544. doi: 10.3390/nano14191544. Nanomaterials (Basel). 2024. PMID: 39404271 Free PMC article. Review.
-
Research on Flexible Sensors for Wearable Devices: A Review.Nanomaterials (Basel). 2025 Mar 30;15(7):520. doi: 10.3390/nano15070520. Nanomaterials (Basel). 2025. PMID: 40214565 Free PMC article. Review.
-
Recent Advances in Self-Powered Wearable Flexible Sensors for Human Gaits Analysis.Nanomaterials (Basel). 2024 Jul 10;14(14):1173. doi: 10.3390/nano14141173. Nanomaterials (Basel). 2024. PMID: 39057851 Free PMC article. Review.
References
-
- Kim S., Lee Y., Kim H.-D., Choi S.-J. A tactile sensor system with sensory neurons and a perceptual synaptic network based on semivolatile carbon nanotube transistors. NPG Asia Mater. 2020;12:76. doi: 10.1038/s41427-020-00258-9. - DOI
-
- Chun S., Kim J.-S., Yoo Y., Choi Y., Jung S.J., Jang D., Lee G., Song K.-I., Nam K.S., Youn I., et al. An artificial neural tactile sensing system. Nat. Electron. 2021;4:429–438. doi: 10.1038/s41928-021-00585-x. - DOI
-
- Luo Y., Li Y., Sharma P., Shou W., Wu K., Foshey M., Li B., Palacios T., Torralba A., Matusik W. Learning human–environment interactions using conformal tactile textiles. Nat. Electron. 2021;4:193–201. doi: 10.1038/s41928-021-00558-0. - DOI
-
- Hu Z., Lin L., Lin W., Xu Y., Xia X., Peng Z., Sun Z., Wang Z. Machine Learning for Tactile Perception: Advancements, Challenges, and Opportunities. Adv. Intell. Syst. 2023;5:2200371. doi: 10.1002/aisy.202200371. - DOI
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
