

Numerosity estimation of virtual humans as a digital-robotic marker for hallucinations in Parkinson's disease
- PMID: 38472203
- PMCID: PMC10933269
- DOI: 10.1038/s41467-024-45912-w
Numerosity estimation of virtual humans as a digital-robotic marker for hallucinations in Parkinson's disease
Abstract
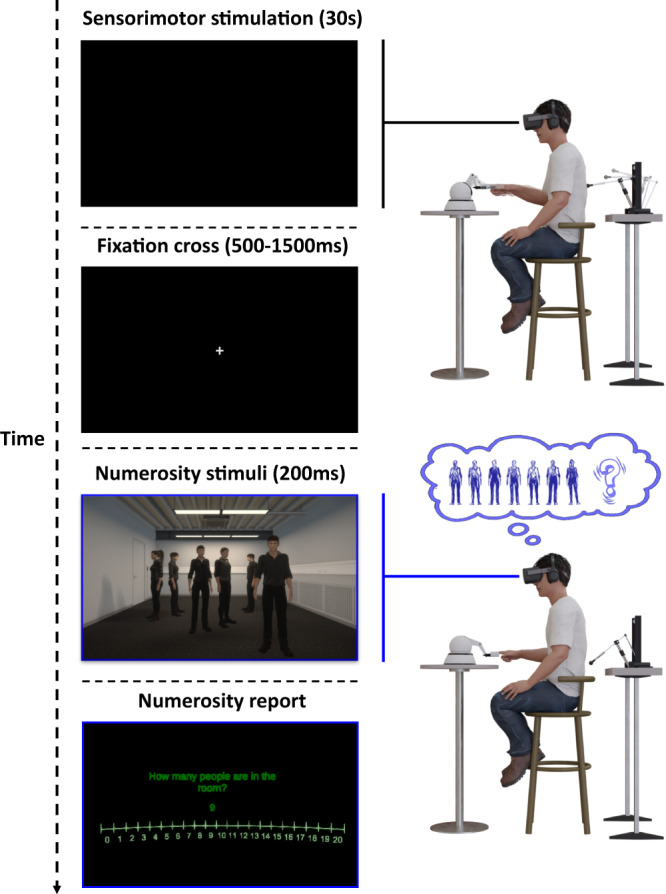
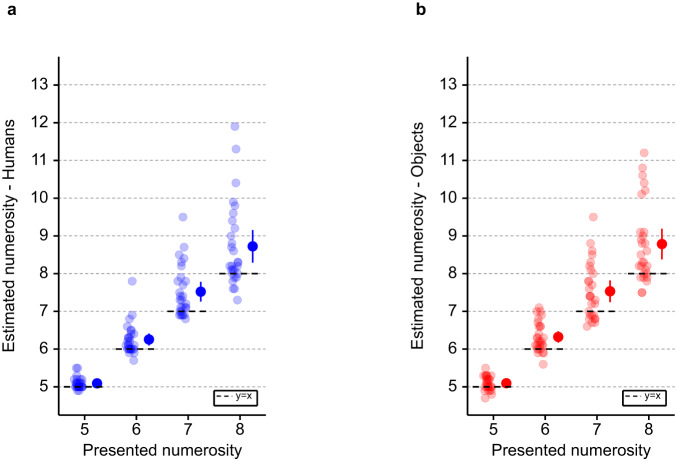
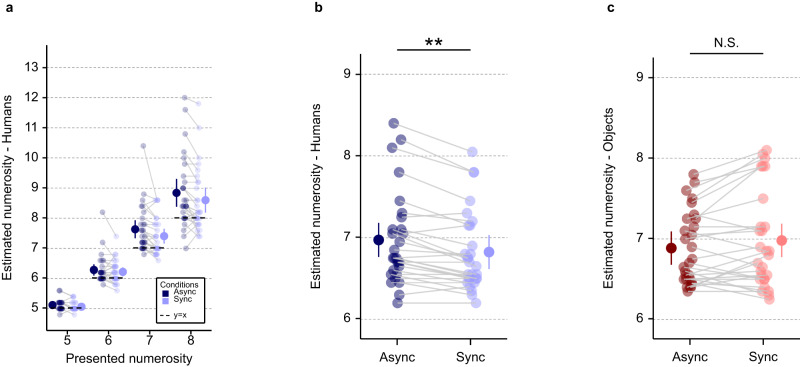
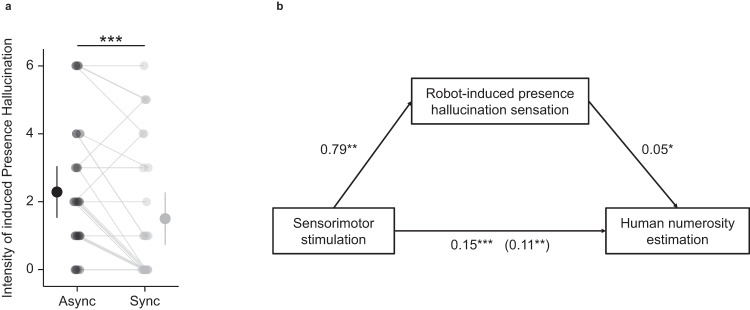
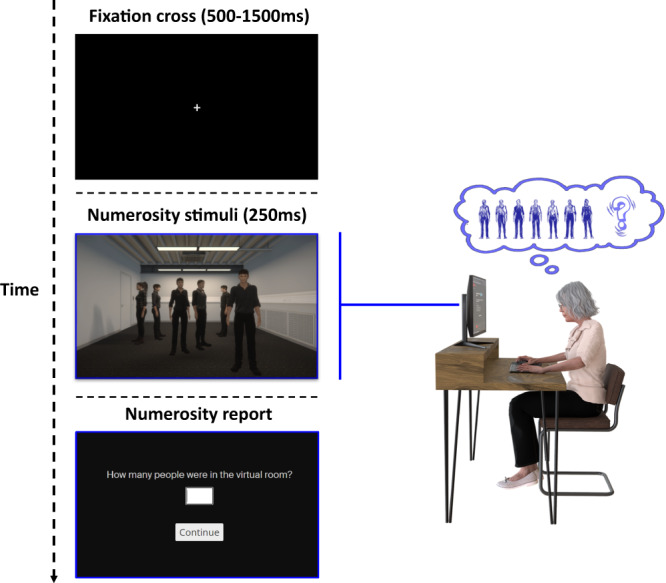
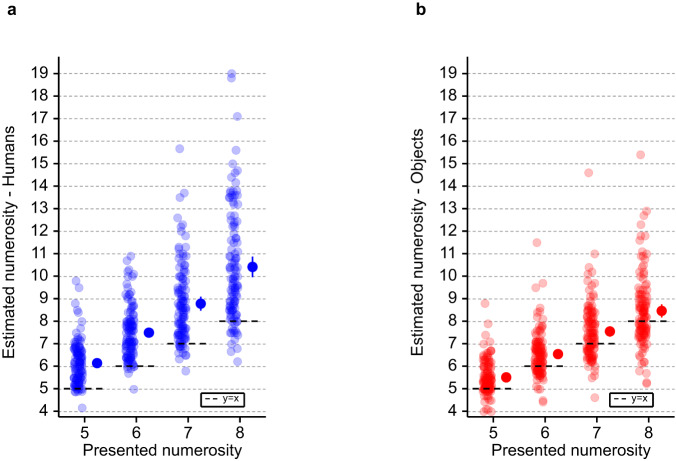
Hallucinations are frequent non-motor symptoms in Parkinson's disease (PD) associated with dementia and higher mortality. Despite their high clinical relevance, current assessments of hallucinations are based on verbal self-reports and interviews that are limited by important biases. Here, we used virtual reality (VR), robotics, and digital online technology to quantify presence hallucination (vivid sensations that another person is nearby when no one is actually present and can neither be seen nor heard) in laboratory and home-based settings. We establish that elevated numerosity estimation of virtual human agents in VR is a digital marker for experimentally induced presence hallucinations in healthy participants, as confirmed across several control conditions and analyses. We translated the digital marker (numerosity estimation) to an online procedure that 170 PD patients carried out remotely at their homes, revealing that PD patients with disease-related presence hallucinations (but not control PD patients) showed higher numerosity estimation. Numerosity estimation enables quantitative monitoring of hallucinations, is an easy-to-use unobtrusive online method, reaching people far away from medical centers, translating neuroscientific findings using robotics and VR, to patients' homes without specific equipment or trained staff.
© 2024. The Author(s).
Conflict of interest statement
A patent application has been submitted (application number EP23154061.8 – Numerosity estimation impairment measurement system), describing a solution for measuring and quantifying an impairment in numerosity estimation in human subjects, based on the methods described in this manuscript, with Ecole Polytechnique Fédérale de Lausanne (EPFL) as patent applicant, and L.A., O.B., F.B., B.H., and J.P. as inventors. O.B. is inventor on patent US 10,286,555 B2 held by the Swiss Federal Institute (EPFL) that covers the robot-controlled induction of presence hallucination. O.B. is inventor on patent US 10,349,899 B2 held by the Swiss Federal Institute (EPFL) that covers a robotic system for the prediction of hallucinations for diagnostic and therapeutic purposes. O.B. is co-founder and shareholder of Metaphysiks Engineering SA, a company that develops immersive technologies, including applications of the robotic induction of presence hallucinations that are not related to the diagnosis, prognosis or treatment of Parkinson’s disease. O.B. is a member of the board and shareholder of Mindmaze SA. The authors declare no other competing interests.
Figures

References
-
- ffytche, D. H. & Aarsland, D. Chapter Nineteen - Psychosis in Parkinson’s Disease. in International Review of Neurobiology (eds. Chaudhuri, K. R. & Titova, N.) 133 585–622 (Academic Press, 2017). - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
